

El control de conducción eficiente es necesario para determinar qué conductores ayudan a su empresa a reducir costos y quiénes usan el vehículo hasta el desgaste. Con esta herramienta, el despachador puede ver la evaluación de la calidad de conducción del vehículo bajo la responsabilidad del cierto conductor durante cualquier período de tiempo y para cada viaje por separado. Este artículo proporcionará la base teórica y recomendaciones prácticas importantes para configurar el control de conducción eficiente.
Base teórica
La característica clave que ayuda a determinar la calidad de conducción es la aceleración. Esta magnitud física no parece intuitivamente comprensible, por lo que en el marco del aprendizaje se puede comparar con una magnitud más comprensible: la velocidad.
Velocidad y aceleración
La velocidad caracteriza el cambio de posición durante un intervalo de tiempo determinado:
v = S / Δt,
donde v es la velocidad, S es la distancia recorrida durante el intervalo de tiempo considerado (se puede decir que es la diferencia de kilometraje del vehículo al final y al principio), Δt es la duración del intervalo.
Se puede decir que esta fórmula determina la velocidad promedio dentro del viaje. Pero cuanto menor sea el intervalo de tiempo considerado, más se acercará el resultado a la velocidad que se muestra en el velocímetro del vehículo.
La aceleración caracteriza el cambio de velocidad durante un intervalo de tiempo determinado:
a = Δv / Δt,
donde a es la aceleración, Δv es la diferencia de velocidad al final y al principio del intervalo de tiempo considerado, Δt es la duración del intervalo.
El valor promedio de aceleración durante un viaje casi no se utiliza al analizar el movimiento del automóvil, por lo que tiene sentido calcular solo la aceleración para el intervalo de tiempo mínimo.
Unidades de medida
La unidad de velocidad en el Sistema Internacional de Unidades (SI) es el metro por segundo (m/s), sin embargo, en la vida cotidiana se utiliza con más frecuencia la unidad de medida no estándar kilómetro por hora (km/h).
La unidad de aceleración en el SI es el metro por segundo al cuadrado (m/s²), sin embargo, a menudo se utiliza la unidad de medida no estándar g (que es la que se utiliza en Wialon).
g es la aceleración de la gravedad en la superficie de la Tierra, igual a 9.80665 m/s² (a menudo se usa la aproximación g ≈ 10 m/s²). En nuestro caso, es un valor estándar por el cual se divide el valor de aceleración para compararlo con algo más familiar (como la presión a menudo se muestra no en pascales, sino en atmósferas).
La siguiente tabla ayudará a formar una idea del valor promedio de aceleración para diferentes tipos de movimiento:
Tipo de movimiento | Aceleración promedio m/s² | |
|---|---|---|
| m/s2 | g | |
Ascensor de pasajeros | 0.9—1.6 | 0.09—0.16 |
Tren de metro | 1 | 0.1 |
Corredor de distancias cortas | 1.5 | 0.15 |
Ciclista | 1.7 | 0.17 |
Automóvil de pasajeros | 2.5—3 | 0.25—0.3 |
Motocicleta | 3—6 | 0.3—0.6 |
Automóvil de carreras | 8—9 | 0.8—0.9 |
Frenado de emergencia de un automóvil | hasta 20 | hasta 2 |
Lanzamiento y frenado de una nave espacial | 40—60 | 4—6 |
Maniobra de un avión a reacción | hasta 100 | hasta 10 |
Usando las fórmulas proporcionadas, calcularemos la velocidad y la aceleración basándonos en las coordenadas de la unidad obtenidas del rastreador.
En el marco del ejemplo, contaremos el tiempo desde 0 segundos. Para simplificar, asumiremos que la unidad siempre se movió en línea recta y que entre los mensajes la velocidad del vehículo cambió uniformemente.
Número de mensaje | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
Tiempo, s | 0 | 5 | 10 | 20 | 40 | 70 | 100 | 103 |
Distancia, m | 0 | 0 | 25 | 150 | 400 | 900 | 1400 | 1430 |
Velocidad, km/h | 0 | 0 | 18 | 45 | 45 | 60 | 60 | 0 |
Aceleración, g | 0.000 | 0.000 | 0.102 | 0.077 | 0.000 | 0.014 | 0.000 | -0.567 |
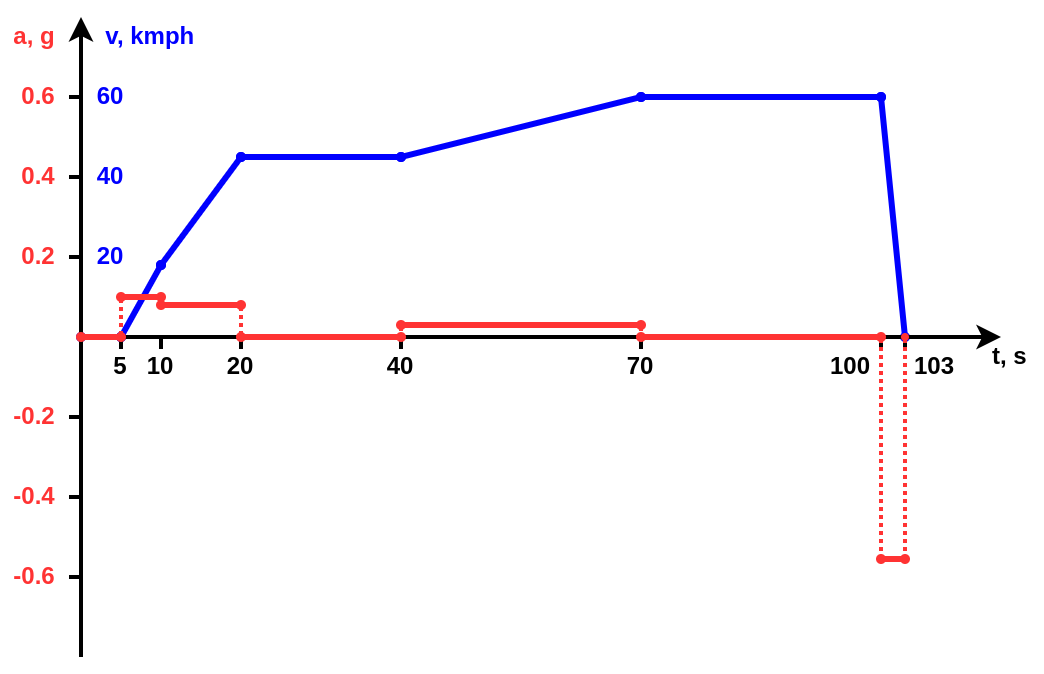
Basándonos en la tabla y el gráfico, podemos establecer las siguientes conclusiones:
- La velocidad es igual a 0 cuando la unidad no cambia de posición.
- La aceleración es igual a 0 cuando la unidad no cambia de velocidad (está parada o se mueve a velocidad constante).
- Un valor positivo de aceleración corresponde a un aumento de velocidad, y uno negativo a una desaceleración.
- Por la magnitud de la aceleración se puede juzgar cuán rápida y significativamente cambió la velocidad entre los mensajes.
Acelerómetros
Los dispositivos para medir la aceleración se llaman acelerómetros. Las tecnologías modernas permiten crear acelerómetros en miniatura de menos de un milímetro de tamaño. Están ampliamente extendidos y se utilizan en muchos tipos de tecnología: smartphones, pulseras de fitness, rastreadores, automóviles, etc.
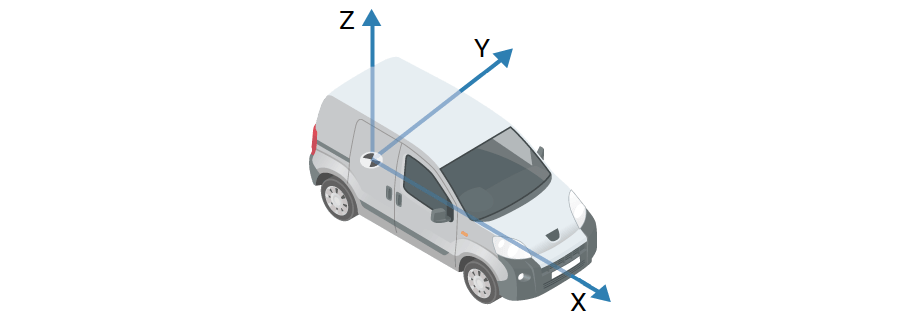
Dado que la aceleración es una magnitud vectorial, es decir, tiene dirección, para su medición completa se requieren tres acelerómetros instalados perpendicularmente entre sí. Juntos forman un acelerómetro triaxial, en el que, por ejemplo, el eje X muestra aceleración o frenado, el eje Y — giros, el eje Z — subidas y bajadas.
No será posible instalar el dispositivo perfectamente nivelado en la unidad, por lo que después de la instalación es necesario realizar una calibración. En general, el procedimiento de calibración implica varias etapas: movimiento en línea recta, giros, frenado suave y brusco, viaje sin infracciones, viaje con infracciones. Sin embargo, para diferentes dispositivos, la calibración puede variar significativamente. Puede conocer sobre ella a partir de la documentación del dispositivo.
Dado que en los acelerómetros y rastreadores se utiliza la misma base de elementos (chips), sus lecturas no diferirán en más del 15% (y con una calibración correcta, este valor será aún menor).
Implementación en Wialon
La lógica general del control de conducción eficiente en Wialon se puede presentar de la siguiente manera:
- En las propiedades de la unidad, en la pestaña Conducción Eficiente, se realizan ajustes y se crean criterios, es decir, reglas según las cuales se realizará la evaluación posteriormente.
- La evaluación de los mensajes según los criterios se realiza al ejecutar un informe con ciertas tablas (la homónima Conducción Eficiente o algunas otras) o al trabajar con la aplicación Eco Driving.
A continuación, la atención se centrará en los lugares que más frecuentemente generan preguntas entre los usuarios.
Enfoque general para la configuración
Dependiendo de qué datos provienen del rastreador, la configuración de la conducción eficiente debe realizarse de manera diferente. A continuación se describirán todos los enfoques existentes, ordenados por precisión de mayor a menor.
Tipos de rastreadores | Precisión | Complejidad de configuración | Cálculo de aceleración por | Frecuencia de mensajes | Creación de sensores | Criterios para control de aceleración |
1. El rastreador envía parámetros calculados de conducción eficiente | Alta | Fácil | Parámetros de conducción eficiente | Cualquiera | No se requiere | Aceleración, Frenado, Giro, Conducción imprudente |
2. El rastreador envía parámetros calculados de aceleración en formato personalizado | Alta | Media | No importa | Cualquiera | Se requiere | Personalizados |
3. El rastreador envía valores brutos de aceleración por ejes | Media | Alta | No importa | 1 vez cada 2 segundos | Se requiere | Personalizados |
4. El rastreador no envía datos de aceleración de ninguna forma | Baja | Fácil | GPS | 1 vez cada 2 segundos | No se requiere | Aceleración, Frenado, Giro, Conducción imprudente |
A continuación, proporcionaremos algunos detalles sobre cada uno de los enfoques:
1. El rastreador envía parámetros calculados de conducción eficiente
En Wialon, los parámetros de conducción eficiente se llaman wln_accel_max, wln_brk_max y wln_crn_max. Simplificando, se puede decir que estos parámetros contienen valores correspondientes a la aceleración máxima registrada entre dos mensajes consecutivos. Esto permite configurar el rastreador a cualquier frecuencia de guardado de mensajes sin afectar la precisión del resultado.
Tales parámetros son reconocidos automáticamente por el sistema, por lo que no es necesario crear sensores adicionales. Es suficiente configurar el cálculo de aceleración según los parámetros de conducción eficiente y crear criterios con el tipo Aceleración, Frenado, Giro, Conducción imprudente.
2. El rastreador envía parámetros calculados de aceleración en formato personalizado
Estos rastreadores también utilizan algoritmos especiales para procesar datos del acelerómetro, lo que permite configurar el rastreador a cualquier frecuencia de guardado de mensajes sin afectar la precisión del resultado.
Sin embargo, estos rastreadores envían información sobre aceleración en un formato personalizado, por lo que tales parámetros no son reconocidos automáticamente por el sistema, por lo tanto, para su consideración es necesario crear sensores (lo más lógico es elegir el tipo Acelerómetro), y luego, basándose en estos sensores, crear criterios con el tipo Personalizado.
3. El rastreador envía valores brutos de aceleración por ejes
Si los rastreadores no tienen algoritmos especiales para procesar datos del acelerómetro, envían parámetros con lecturas en tres ejes en el momento de la generación del mensaje. En tal caso, cuanto mayor sea la frecuencia de guardado de mensajes, mayor será la precisión del resultado, sin embargo, esto llevará a un aumento del tráfico GPRS utilizado por el rastreador. La frecuencia recomendada es 1 mensaje cada 2 segundos.
Tales parámetros no son reconocidos automáticamente por el sistema, por lo tanto, para su consideración es necesario crear dos sensores (lo más lógico es elegir el tipo Acelerómetro): uno se basará en el parámetro del eje X (un valor positivo corresponderá a aceleración y uno negativo a frenado), y el otro se basará en el parámetro del eje Y (un valor positivo mostrará un giro en una dirección y uno negativo en la otra). El eje Z, relacionado con la aceleración vertical, no se utilizará para los cálculos. Luego, basándose en estos dos sensores, crear criterios con el tipo Personalizado.
4. El rastreador no envía datos de aceleración de ninguna forma
Si los rastreadores no tienen acelerómetro, es decir, no pueden medir la aceleración, se puede calcularla matemáticamente a partir de los datos del GPS. En tal caso, cuanto mayor sea la frecuencia de guardado de mensajes, mayor será la precisión del resultado, sin embargo, esto llevará a un aumento del tráfico GPRS utilizado por el rastreador. La frecuencia recomendada es 1 mensaje cada 2 segundos.
Luego es necesario configurar el cálculo de aceleración por GPS y crear criterios con el tipo Aceleración, Frenado, Giro, Conducción imprudente.
Valores recomendados de criterios
La magnitud de la aceleración al conducir un vehículo depende de muchos factores: potencia del motor, condición técnica del vehículo, peso del vehículo, carga del cuerpo, agarre de los neumáticos con la carretera, calidad de la superficie de la carretera, condiciones meteorológicas, etc. Debido a esto, no existen normas generales recomendadas de aceleración al conducir un vehículo.
La fuente de información sobre los valores promedio de aceleración en diversas situaciones (aceleración suave, giro brusco, frenado de emergencia, etc.) puede ser literatura especializada, que debe contener información sobre modelos específicos de vehículos. También se podría ajustar a los valores que utilizan las compañías de seguros, sin embargo, debido a las peculiaridades de su actividad, no publican dicha información en acceso abierto.
En base a esto, vale la pena formar expectativas correctas del módulo Conducción eficiente: permite detectar infracciones de acuerdo con los criterios configurados y realizar una evaluación comparativa de varias unidades o conductores.
Plantillas de criterios
Para simplificar la configuración de criterios en Wialon, hay 3 plantillas estándar disponibles: para automóviles, para camiones y para autobuses. Con su ayuda, se pueden obtener varios criterios de inmediato, que se pueden dejar en su forma original, modificar ligeramente o simplemente usar como ejemplo para la configuración independiente.
También es una buena recomendación verificar los criterios en la práctica. Para esto, es suficiente realizar varios viajes en el vehículo: en uno se debe mantener un estilo de conducción normal, y en otro, intentar cometer las mismas infracciones que luego deben ser monitoreadas. Después de esto, será suficiente revisar los mensajes del rastreador o ejecutar un informe con la tabla Conducción eficiente para determinar los valores de aceleración con diferentes estilos de conducción, y luego, basándose en ellos, determinar los límites para las infracciones.