

The trip detector is configured in the unit properties and is used to detect movement intervals (trips) and idles (stops, parkings). Depending on the equipment and settings on this tab, the reports, depending on the intervals of movement and idles, can look quite different. Therefore, it is important to set the correct settings here.
Required access: View detailed properties — to view this tab; Edit trip detector and fuel consumption — to edit this tab.
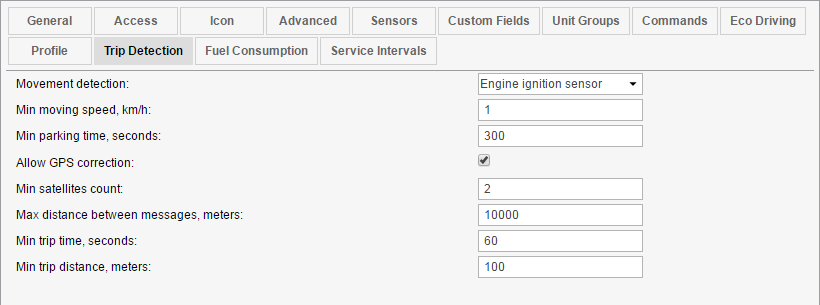
Movement detection
There are five main methods to detect movement.
GPS speed. Сan be applied to any device type and configuration. The parameters of this method are described below.
GPS coordinates. Can be used for devices that send location data only since speed is not taken into account when calculating motion. The movement is detected if coordinates in two successive messages are different. This type of movement detection is always used with GPS correction (see below).
Engine ignition sensor. Available for units that have ignition sensor. The movement is detected upon meeting two conditions: the sensor should be switched on and the message is received at a speed that is greater than or equal to the minimum speed. The end of the movement is detected when the sensor is switched off or a speed value is less than the indicated minimum moving speed. Also, movement is considered to be terminated when the timeout is exceeded.
Mileage sensor. Can be used for units which have a mileage sensor. The sensor transmits absolute mileage. The movement is detected when the values of the distance sensor increase and the message is received at a speed greater than or equal to the minimum speed. Moreover, if the speed parameter is absent or invalid, the state of motion is determined only by the growth of the values of the mileage sensor.
Relative odometer. Shows what distance the unit has travelled since the previous message. The movement is detected upon receiving a message with more than 0 value of a relative odometer and speed value higher than the minimum moving speed. Moreover, the state of movement can be detected using relative odometer values only, if the speed parameter is missed or invalid.
After the movement detection method is chosen, use the parameters described below. These parameters allow detecting the states of movement, such as trips, parkings, and stops.
Detection of movement states
Min moving speed
Specify what speed should be considered as the beginning of the motion. This is required to exclude data outliers. The equipment can determine coordinates with some inaccuracy, therefore assign a low speed to the unit that is not actually moving. Set this parameter to exclude such cases from the trips. When determining movement by a sensor (for example, ignition), this parameter is used to detect stops inside a trip.
Min parking time
Specify how long (in seconds) the unit should be motionless to register this as a parking. This option allows you to include stops (in traffic jams, at lights or intersections) in a trip (instead of breaking the trip). However, if the time interval between the two closest messages is longer than the minimum parking time, the trip is broken into two parts. When detecting trips by the sensor (for example, ignition), this parameter is applied only to intervals with the sensor off or at a speed less than a minimum moving speed. If Allow GPS correction is on, the value of the minimum parking time should be no less than 10 seconds. Note that to detect a parking duration, it is necessary to receive at least two messages with a speed value below the min moving speed indicated.
Allow GPS correction
This option is applied automatically for the first two types of motion detection. In case you use one of the sensors (ignition, mileage, or odometer), to receive more precise data in reports, you can use GPS correction in addition. To activate the GPS correction of trip/stay detection, check the Allow GPS correction box and configure the parameters described below.
Min satellites count
Specify the number of available satellites at which you should consider the data to be valid. The recommended number is three and more, but for some types of equipment two is enough.
Max distance between messages
This setting is applied in the following situation: if from the previous message to the current one a unit has moved a distance greater than the specified one, the previous interval is terminated and a new one begins. The value of this field should be at least 50 meters.
Min trip time
This parameter is designed to exclude cases of the data outliers. For example, the unit in a parking lot moved from one place to another, and the movement of 40 seconds was detected. To exclude such cases from trips, set the minimum trip time (in seconds).
Min trip distance
This is a similar parameter. But here you indicate the minimum trip distance. For example, the car is parked, and the device sends coordinates according to which the car has moved slightly. It can happen due to the permissible equipment error. This situation can be counted for movement and to exclude it, indicate how far the unit should move to consider it a trip.