Mientras detectar los llenados se utilizan datos procesados (en las etapas Preparación de datos y Filtración).
Los puntos suspensivos (...) reemplazan las Propiedades de la unidad → Consumo de combustible mientras indicar las rutas a las opciones.
Las siguientes opciones están estrechamente relacionadas con esta detección:
- Opción: Volumen mínimo de llenado;
- Opción: Detectar llenados de combustible solo cuando el vehículo está parado;
- Opción: No filtrar los sensores del nivel de combustible;
- Situación: ¿cómo se detecta un llenado?
Volumen mínimo de llenado
... → sección Detección de llenados/descargas de combustible → Volumen mínimo de llenado
Esta opción permite excluir llenados erróneos, ya que en el proceso de movimiento pueden surgir indicaciones erróneas de las subidas del nivel de combustible.
Detectar llenados de combustible solo cuando el vehículo está parado
... → sección Detección de llenados/descargas de combustible → Detectar llenados de combustible solo cuando el vehículo está parado
En condiciones normales los llenados de combustible solo se realizan, cuando el vehículo está parado. Esta opción permite buscar los llenados solo durante estacionamientos/paradas. Además, si en la pestaña Avanzadas está indicado intervalo máximo entre mensajes y se ha superado, en este intervalo puede detectarse un llenado de combustible.
Calcular el volumen de llenados con datos en bruto
... → sección Detección de llenados/descargas de combustible → Calcular el volumen de llenados con datos en bruto
Si la filtración está activada, pueden surgir distorsiones de los niveles inicial y final del nivel de combustible. Para excluir los errores, durante el cálculo del volumen del llenado se utilizan los datos sin filtrar. Esta opción se aplica solo cuando el valor antes de la filtración es mayor que el valor obtenido como resultado de filtración.
Situación: ¿cómo se detecta un llenado?
Límites temporales de un llenado y su volumen
Se está realizando un llenado.
Que el volumen del combustible del mensaje corriente sea Vcorr, el volumen del combustible del mensaje anterior — Vant. Si la diferencia d para el mensaje corriente (?=Vcorr – Vant) es positiva, este mensaje se considerará el mensaje inicial del llenado.
Pasa algún tiempo. Se está acercando el fin del llenado. Cuando para un mensaje el dato d sea negativo (es decir, el volumen del combustible en el mensaje corriente sea menos del mensaje anterior), este mensaje se considerará el mensaje final del llenado.
Si el nivel de combustible queda sin cambios durante el tiempo indicado en el parámetro Tiempo de espera para separar llenados consecutivos en la pestaña Consumo de combustible de las propiedades de la unidad, el llenado se considerará terminado también.
El volumen del llenado es Vfinal - Vinicial (la diferencia entre los niveles de combustible de los mensajes inicial y final del llenado).
Si está activada la opción Calcular el volumen de llenados por datos en bruto, se utilizan los valores del volumen máximo (Vmax) y mínimo (Vmin) de combustible en el intervalo del llenado. El volumen del llenado será Vmax - Vmin.
Algoritmo del cálculo del tiempo de un llenado
Luego se busca el momento de realizarse el llenado.
Para cada mensaje dentro del intervalo de llenado (excluido el último mensaje) se busca iterativamente la delta con el siguiente mensaje d=Vsig – Vcorr que muestra el volumen del crecimiento del combustible entre los mensajes corriente y siguiente.
El tiempo del mensaje cuya delta es mayor de otras, se considera el tiempo del llenado (en otras palabras, se escoge el mensaje izquierdo del par de mensajes, cuya delta es mayor de las demás).
El tiempo (el momento del tiempo) del llenado se calcula dinámicamente en cada situación concreta a base de los datos de los sensores disponibles.
Detección de llenados en la tabla "Movimiento de combustible"
La tabla Movimiento de combustible determina la actividad relacionada con el combustible (llenados, descargas e intervalos del trabajo del sensor contador) de la unidad para que se ejecuta el informe y para las unidades que estaban cerca con la misma. El siguiente algoritmo explica el principio según el que el sistema determina cuál de las unidades que estaban cerca recibió el combustible.
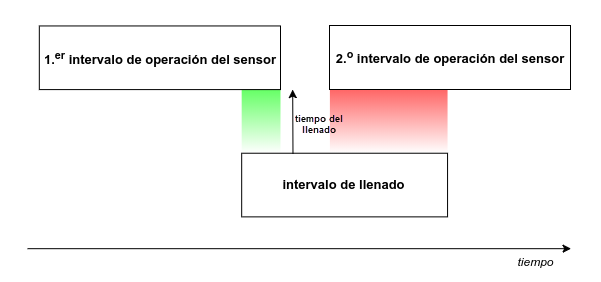
Los intervalos de entregar y recibir combustible se consideran relacionados si el tiempo del llenado de la unidad que recibió el combustible ha caído en el intervalo de operación del sensor de la unidad que lo entregaba (véase la imagen).
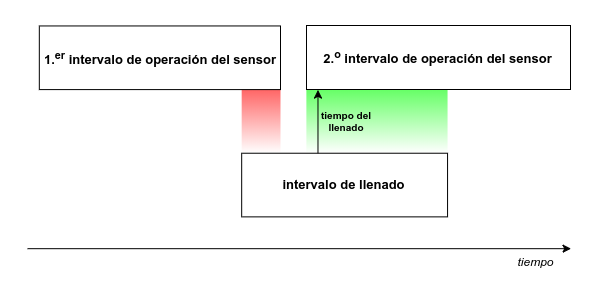
Si no se ha encontrado tal coincidencia, el algoritmo busca intersecciones de todo el intervalo del llenado de la unidad que ha recibido el combustible con los intervalos de operación del sensor contador de la unidad que lo entregaba, y escoge el más proximo de ellos (véase la imagen).