

To work with the Trip detector tab, you should have the following access rights:
- View detailed object properties. To view the tab.
- Edit trip detector. To edit the tab.
The parameters of the trip detector are used to determine movement, trip, stop and parking intervals.
To work with the tab, familiarize yourself with the following concepts:
Concept | Definition |
Movement | The intervals in which the speed was higher or equal to the value from the Minimum moving speed field are regarded as movement. Each unit message is considered separately. |
Trip | A trip is an interval during which the conditions of all the trip detector parameters are met. These conditions depend on the selected movement detection method and are described in the table below. |
Stop | A stop is an interval during which the speed was lower than the value from the Min. moving speed field, but the duration of which was less than the value from the Min. parking time field. When a stop is detected, a trip is not interrupted. |
Parking | A parking is an interval during which the speed was lower than the value from the Min. moving speed field, but the duration of which was greater than or equal to the value from the Min. parking time field. When a parking interval is detected, a trip ends. |
Unit messages with the data determined by LBS and Wi-Fi points are not taken into account in the trip detector.
Movement detection methods
The selected movement detection method determines the way the trips are detected. The following methods are available:
| Method | Description |
|---|---|
| Speed | This method can be used for all types of devices which send speed values determined by GPS or another source. If you select this method, a trip is detected when both of these conditions are met:
|
GPS coordinates | This method can be used for devices which don't send speed values, but transmit location data determined by GPS. If you select this method, a trip is detected when both of these conditions are met:
|
| Engine ignition sensor | This method is available only if the unit has a sensor of the same-name type. A trip is detected when these three conditions are met:
A trip is terminated if the engine ignition sensor is off or the speed value is less than the minimum one. The trip also ends if the timeout specified for the sensor is exceeded. |
| Mileage sensor | This method is available only if the unit has a sensor of the same-name type which sends absolute mileage values. A trip is detected when these three conditions are met:
If the speed value is invalid or unavailable, the unit movement is detected according to the increase in the mileage sensor values. |
| Relative odometer | This method is available only if the unit has a sensor of the same-name type which determines the distance travelled by the unit since the last message. A trip is detected when these three conditions are met:
If the speed value is invalid or unavailable, the unit movement is detected according to the non-zero values of the relative odometer. |
If the Engine ignition sensor, Mileage sensor or Relative odometer method is selected, and the unit has multiple sensors of a suitable type, the system uses the sensor with the smallest ID to determine trips. If there is no sensor of a suitable type, the Speed method is used instead of the selected one.
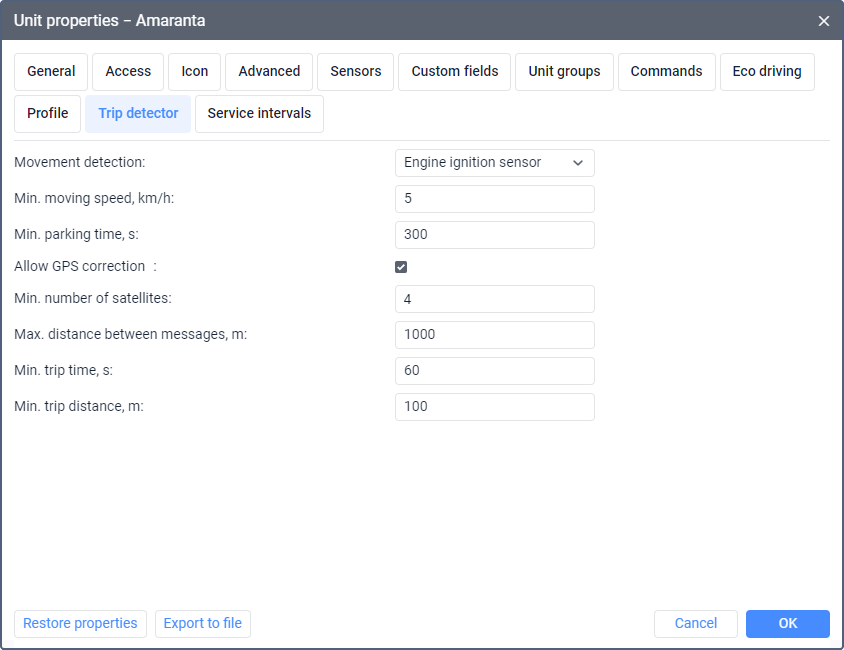
Movement parameters
After you select the movement detection method, specify values of parameters which should be taken into account in trip, stop and parking intervals.
| Parameter | Description |
|---|---|
Min. moving speed | The minimum speed value which should be considered as the beginning of movement. It is specified so that the outliers of GPS coordinates and device errors are not considered as movement when the unit is parked. |
| Min. parking time | To detect parking intervals, specify the minimum number of seconds during which the unit should be motionless in order for the system to consider it as parked. If the unit has been parked for less than the specified time, it is considered as a stop within the trip. If during a trip the time between two successive messages is greater than or equal to the specified value, the trip ends. If the Allow GPS correction option is enabled, the minimum value of this parameter should be 10 seconds. |
Allow GPS correction
The Allow GPS correction option is always enabled for the Speed and GPS coordinates movement detection methods. If you use another method, you can disable this option. If the option is enabled, you should specify the values of the following parameters:
| Min. number of satellites | Specify the minimum number of available satellites to detect a trip. The recommended number is at least four. |
| Max. distance between messages | Specify the maximum distance between two messages after which the current movement interval should be stopped and a new one started. This value should be indicated in metres. |
| Min. trip time | Specify the minimum movement time in seconds which should be considered as a trip. This is required to exclude false detections of trips, for example, during short movements in a car park or a traffic jam. This parameter is applied to a sequence of messages. |
| Min. trip distance | Specify the minimum distance in metres which the unit should travel so that its movement is considered as a trip. This is required to exclude possible equipment errors when determining the unit location. This parameter is applied to a sequence of messages. |
Questions and answers