

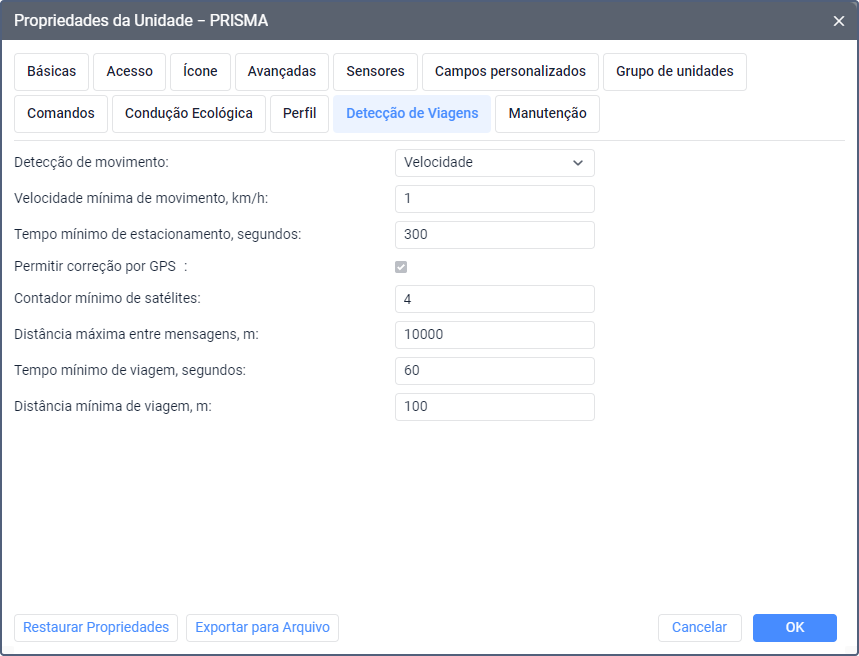
Nesta aba é possível selecionar o método o qual deve ser usado para detectar movimento e especificar valores de parâmetros que devem ser levados em consideração em uma viagem, parada e intervalos de estacionamento.
Para trabalhar com a aba, familiarize-se com os seguintes conceitos:
Conceito | Definição |
|---|---|
Movimento | Os intervalos em que a velocidade foi maior ou igual ao valor do campo Velocidade mínima de movimento são considerados como movimento. Cada mensagem de unidade é considerada separadamente. No entanto, se o método de detecção de movimento por coordenadas GPS for selecionado, o movimento será entendido como a incompatibilidade de coordenadas entre duas mensagens seguidas. |
Viagem | Um viagem é um intervalo durante o qual as condições de todos os parâmetros do detector de viagem são atendidas. Essas condições dependem do método de detecção de movimento selecionado e estão descritas na tabela abaixo. Ao detectar viagens, o sistema considera cada mensagem separada, bem como sua sequência. As viagens podem incluir paradas. |
Parada | Uma parada é um intervalo durante o qual a velocidade foi menor do que o valor do campo Velocidade mínima de movimento, mas cuja duração foi menor do que o valor do campo Tempo mínimo de estacionamento. Quando uma parada é detectada, a viagem não é interrompida. |
Estacionamento | Um estacionamento é um intervalo durante o qual a velocidade foi menor do que o valor do campo Velocidade mínima de movimento, mas cuja duração foi maior ou igual ao valor do campo Tempo mínimo de estacionamento. Quando um intervalo de estacionamento é detectado, a viagem termina. |
As mensagens da unidade com os dados determinados pelos pontos LBS e Wi-Fi não são levadas em conta no detector de viagens.
Métodos de detecção de movimento
O método de detecção de movimento selecionado determina a forma como as viagens são detectadas. Os seguintes métodos estão disponíveis:
| Método | Descrição |
|---|---|
| Velocidade | Esse método pode ser usado para todos os tipos de dispositivos que enviam valores de velocidade determinados por GPS ou outra fonte. Se você selecionar esse método, uma viagem será detectada quando ambas as condições forem atendidas:
|
Coordenadas GPS | Esse método pode ser usado para dispositivos que não enviam valores de velocidade, mas transmitem dados de localização determinados por GPS. Se você selecionar esse método, uma viagem será detectada quando ambas as condições forem atendidas:
|
| Sensor de ignição do motor | Este método estará disponível apenas se a unidade possuir um sensor de ignição do motor. O movimento é detectado quando estas duas condições são atendidas:
Um viagem é finalizada se o sensor de ignição do motor estiver desativado ou se o valor da velocidade é menor que o mínimo. A viagem também termina se o tempo de espera especificado para o sensor for excedido. |
| Sensor de quilometragem | Este método estará disponível apenas se a unidade possuir um sensor de quilometragem que determine o valor absoluto da mesma. O movimento é detectado quando estas duas condições são atendidas:
Se o valor de velocidade for inválido ou indisponível, o estado de movimento é determinado de acordo com o aumento nos valores do sensor de quilometragem. |
| Odômetro relativo | Este método estará disponível apenas se a unidade possuir um sensor de odômetro relativo que determina a distância percorrida pela unidade desde o recebimento da última mensagem. O movimento é detectado quando estas duas condições são atendidas:
Se o valor de velocidade for inválido ou indisponível, o estado de movimento é determinado de acordo com o aumento nos valores de odômetro relativo. |
Se for selecionado o método Sensor de ignição do motor, Sensor de quilometragem ou Odômetro relativo e a unidade tiver vários sensores de um tipo adequado configurados, o sensor com a menor ID no sistema será usado para determinar as viagens. Se não houver nenhum sensor de um tipo adequado, o método Velocidade será usado em vez do método selecionado.
Parâmetros de movimento
Após selecionar o método de detecção de movimento, é necessário especificar os valores dos parâmetros com os quais serão levados em consideração os intervalos de viagem, paradas e estacionamento.
| Parâmetro | Descrição |
|---|---|
Velocidade mínima de movimento | O valor mínimo de velocidade que deve ser considerado como início do movimento. É especificado para que os valores discrepantes das coordenadas GPS e os erros do dispositivo não sejam considerados como movimento quando a unidade estiver estacionada. |
| Tempo mínimo de estacionamento | Para determinar o intervalo de estacionamento é necessário especificar o número mínimo de segundos pelos quais a unidade deve ficar parada para que o sistema a considere estacionada. Se a unidade estiver estacionada por menos tempo do que o especificado, isso será considerado como uma parada dentro da viagem. Se, durante uma viagem, o tempo entre duas mensagens sucessivas for maior ou igual ao valor especificado, a viagem é encerrada. Se a opção Permitir correção por GPS estiver ativada, o valor mínimo desse parâmetro deverá ser 10 segundos. |
Permitir correção por GPS
A opção Permitir correção por GPS está sempre ativada para os métodos de detecção de movimento por velocidade e coordenadas de GPS. Ao utilizar outro método, é possível desativar essa opção. Se a opção estiver ativada, deve-se especificar os valores dos seguintes parâmetros:
| Parâmetro | Descrição |
|---|---|
| Número mínimo de satélites | Especificar o número mínimo de satélites disponíveis para detectar uma viagem. O número recomendado é de pelo menos quatro. |
| Distância máxima entre mensagens | Especificar a distância máxima entre duas mensagens após a qual o intervalo de movimento atual deve ser interrompido e um novo deve ser iniciado. Esse valor deve ser indicado em metros. |
| Tempo mínimo de viagem | Especificar o tempo mínimo de movimento em segundos que deve ser considerado uma viagem. Isto é necessário para que detecções de viagem falsas não aconteçam em situações como movimentações curtas num estacionamento ou no trânsito. Esse parâmetro é aplicado a uma sequência de mensagens. |
| Distância mínima da viagem | Especificar a distância mínima em metros em que a unidade deve percorrer para que a movimentação seja considerada uma viagem. Isto é necessário para que possíveis erros de equipamento não sejam levados em consideração ao determinar a localização da unidade. Esse parâmetro é aplicado a uma sequência de mensagens. |