Режим работы
В этом разделе настроек можно выбрать подходящий режим работы. Режим работы влияет на расход заряда батареи и точность позиционных данных.
Режим | Описание |
Лайт | Режим, который позволяет экономить заряд батареи и получать приблизительные данные о местоположении объекта. |
Стандарт | Режим, который позволяет умеренно расходовать заряд батареи и получать точные треки объекта. |
Произвольный | Режим, который можно настроить самостоятельно в соответствии с вашими требованиями. |
Для определения местоположения объекта используются алгоритмы Google, которые позволяют выявлять координаты с помощью GPS, Wi-Fi и сотовых станций.
Для возможности выбирать режим работы, в веб-приложении Configurator для устройства должна быть активирована опция Разрешить пользователю видеть и выбирать режимы работы в мобильном приложении.
Настройка произвольного режима
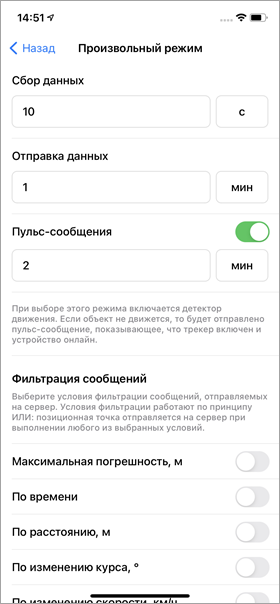
Чтобы настроить произвольный режим, нажмите на кнопку Редактировать и установите необходимые настройки.
Настройка | Описание |
Сбор данных | В этом поле необходимо указать, как часто должны генерироваться позиционные точки. В поле справа выберите единицу измерения (секунды или минуты). Чем меньше указанное значение, тем точнее данные. Если указанное значение меньше минуты, это значительно увеличивает расход трафика и заряда батареи. Если значение равно 0, сбор данных происходит постоянно. |
Отправка данных | В этом поле необходимо указать, как часто позиционные данные должны отправляться на сервер. В поле справа выберите единицу измерения (секунды или минуты). Чем меньше указанное значение, тем больше расход трафика и заряда батареи. |
Пульс-сообщения | Активируйте эту опцию, чтобы указать частоту, с которой пульс-сообщения должны отправляться на сервер, когда объект не движется. Такие сообщения позволяют видеть только то, что объект на связи, и в них нет данных о местоположении. В поле справа выберите единицу измерения (секунды или минуты). Если эта опция не активирована, то частота сбора и отправки данных соответствует первым двум опциям, вне зависимости от того, движется объект или нет. |
Фильтрация сообщений
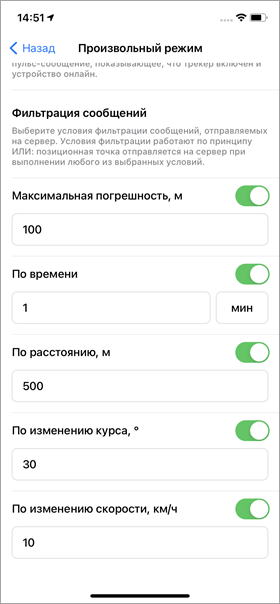
В этой секции можно настроить критерии фильтрации сообщений. Фильтрация позволяет избежать отправки избыточных данных на сервер и уменьшить расход трафика.
Сообщения фильтруются только в том случае, если они получены посредством GPS. Если местоположение определяется по сотовым вышкам и Wi-Fi, сообщения имеют нулевые значения скорости, курса, количества спутников, а погрешность может превышать 2000 метров, поэтому они фильтрации не подвергаются.
Критерии фильтрации работают по принципу ИЛИ: сообщение отправляется на сервер, если оно считается валидным хотя бы по одному критерию.
Критерий фильтрации | Описание |
Максимальная погрешность | Активируйте эту опцию, чтобы указать максимальную допустимую погрешность позиционных данных, которые должны отправляться на сервер. Если погрешность данных превышает указанное значение, сообщение считается невалидным по этому критерию. |
По времени | Активируйте эту опцию, чтобы указать, сколько времени должно пройти с момента предыдущего сообщения для отправки новой позиционной точки. В выпадающем списке выберите единицу измерения (секунды или минуты). |
По расстоянию | Активируйте эту опцию, чтобы указать расстояние, которое должен проехать объект с момента предыдущего сообщения для отправки новой позиционной точки. |
| По изменению курса | Активируйте эту опцию, чтобы указать, насколько градусов должен измениться угол курса с момента предыдущего сообщения для отправки новой позиционной точки. Сообщения, сгенерированные до того, как угол курса увеличился или уменьшился на указанное значение, считаются невалидными по этому критерию. |
По изменению скорости | Активируйте эту опцию, чтобы указать, насколько должно измениться значение скорости с момента предыдущего сообщения для отправки новой позиционной точки. |