Si conoce el tipo de dispositivo, su configuración y cómo se instaló, puede saber qué parámetro elegir para el sensor en Wialon. Pero si ha comenzado a trabajar con Wialon recientemente y tiene dudas, este artículo puede ayudarle a seleccionar el parámetro basándose en cómo lo hacen habitualmente otros usuarios.
Recomendaciones generales
La lista de parámetros y su descripción se pueden encontrar en la página del dispositivo específico en el sitio web wialon.com en la sección Hardware. Para ello, introduzca el modelo de dispositivo deseado en la barra de Buscar dispositivos. También puede seleccionar una de las categorías de tipos de equipamiento y encontrar el modelo deseado en la lista. Luego, en la página del dispositivo, vaya a la pestaña Parámetros (ejemplo de dicha página para WiaTag).
- En la mayoría de los casos, se puede entender el contenido del parámetro por su nombre en inglés. Por ejemplo, el parámetro fuel_lvl probablemente mostrará el valor del nivel de combustible, el parámetro total_mileage mostrará los valores del sensor de kilometraje, etc. Los nombres de los parámetros obtenidos del CAN bus generalmente comienzan con el prefijo can.
- Los parámetros que transmite el dispositivo pueden estar descritos en la documentación del equipamiento. La documentación generalmente se presenta en el sitio web del fabricante.
- Existe una lista de parámetros virtuales que están definidos en el sistema por defecto y son adecuados para casi cualquier tipo de equipamiento:
- speed — velocidad de movimiento;
- altitude — altura sobre el nivel del mar;
- sats — número de satélites;
- course — dirección de movimiento;
- lat — latitud geográfica;
- lon — longitud geográfica;
- time — tiempo UNIX del mensaje;
- regtime — tiempo de registro del mensaje en el servidor.
El método de búsqueda y verificación del parámetro seleccionado depende del tipo de sensor en el que se utiliza. A continuación, veremos varios ejemplos para los tipos de sensores más comúnmente utilizados.
Sensor de ignición
El Sensor de ignición es un sensor digital que muestra si el motor está en marcha o no. Cuando el valor del sensor digital toma un valor cero, se considera apagado, y cuando el valor toma un valor distinto de cero, el sensor se considera encendido.
Como parámetro para el Sensor de ignición puede ser adecuada una de las entradas digitales (al final de los mensajes, el parámetro con formato I/O). El I/O describe el estado de todas las entradas y salidas digitales simultáneamente, y se puede usar para determinar el estado de una entrada digital específica usando el parámetro inN (la lógica de selección del número de entrada N se describe en otro artículo).
También se puede intentar crear un sensor de ignición basado en el parámetro que muestra el voltaje externo (generalmente se llama pwr_ext). En este caso, es necesario crear una Tabla de cálculo en las propiedades del sensor. En el manual del usuario se proporciona un ejemplo de dicha tabla. Al usar este ejemplo, solo es necesario cambiar el valor umbral de voltaje al cual se considerará que la ignición está activada.
Método práctico de selección y verificación del parámetro
- Apague el motor y espere a recibir varios mensajes del rastreador.
- Encienda el motor y espere a recibir varios mensajes más.
- Compare los mensajes recibidos en los puntos 1 y 2. Si solo un parámetro cambió abruptamente, es muy probable que éste muestre el estado de la ignición. Si cambiaron varios parámetros, se puede seleccionar el necesario mediante una verificación adicional descrita en el siguiente punto.
- Examine los mensajes con velocidad distinta de cero. Se supone que la ignición está activada cuando hay velocidad, así como en varios mensajes antes y después de la presencia de velocidad. Se recomienda considerar intervalos de al menos cinco minutos de duración, ya que algunos rastreadores pueden cambiar el modo de envío de mensajes después del inicio y finalización del movimiento.
Sensores de kilometraje
Actualmente en Wialon existen dos sensores para el registro del kilometraje:
- El Sensor de kilometraje muestra todo el kilometraje de la unidad desde la instalación del sensor.
- El Odómetro relativo muestra el kilometraje entre el mensaje actual y el anterior.
Ambos sensores para el registro del kilometraje utilizan kilómetros (o millas) como unidades de medida. Si el parámetro entrante tiene otras unidades de medida, es necesario aplicar un coeficiente para convertir los valores obtenidos a kilómetros (o millas). Por ejemplo, si el parámetro can_odo muestra el valor en metros, entonces en el campo Parámetro en las propiedades del sensor será necesario escribir la siguiente fórmula para la conversión a kilómetros: can_odo/const1000
Método práctico de selección y verificación del parámetro
Para verificar si el parámetro está correctamente seleccionado para el Sensor de kilometraje o el Odómetro relativo, se puede utilizar la herramienta Distancia. Los valores de los parámetros y la distancia medida entre dos mensajes generalmente no coinciden completamente, pero son conmensurables. Esto se debe a que la herramienta Distancia calcula matemáticamente la distancia entre dos puntos con las coordenadas seleccionadas, mientras que los sensores generalmente cuentan los kilómetros recorridos basándose en el número de rotaciones de la rueda y su diámetro.
El parámetro se puede utilizar en el Sensor de kilometraje si:
- su valor no cambia cuando la unidad está detenida;
- su valor aumenta cuando la unidad se mueve;
- la diferencia de sus valores en dos mensajes adyacentes es conmensurable con el valor obtenido al usar la herramienta Distancia.
El parámetro se puede utilizar en el Odómetro relativo si:
- es igual a cero cuando la unidad está detenida;
- tiene un valor positivo cuando la unidad se mueve;
- tiene valores aproximadamente iguales cuando la unidad se mueve a la misma velocidad;
- su valor es conmensurable con el valor obtenido al usar la herramienta Distancia.
La unidad envió mensajes con los siguientes parámetros:
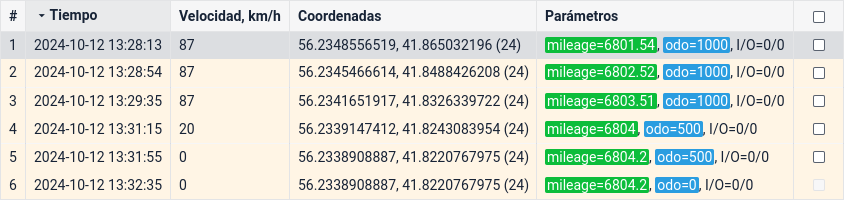
Cree un Sensor de kilometraje basado en el parámetro mileage, ya que aumenta constantemente en movimiento y no cae a cero durante las paradas.
Cree un Odómetro relativo basado en el parámetro odo, ya que tiene diferentes valores en movimiento y cae a cero durante las paradas. Sin embargo, su valor parece demasiado grande, así que intente aplicar la fórmula odo/const1000.
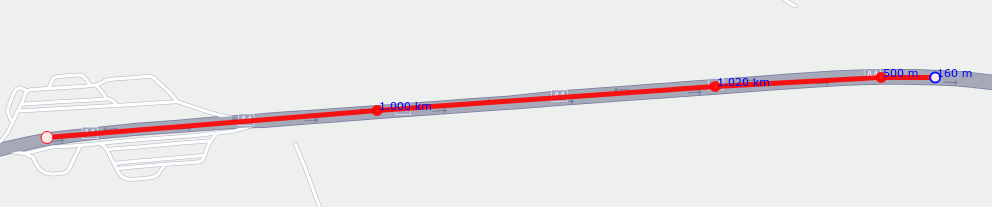
Mida el kilometraje de la unidad entre varios pares de mensajes utilizando la herramienta Distancia, colocando los segmentos medidos sobre la ruta.
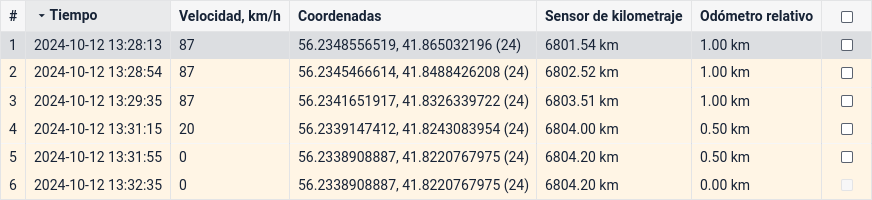
Compare los valores obtenidos:
| № | Sensor de kilometraje | Diferencia con el valor anterior del sensor de kilometraje | Odómetro relativo | Herramienta Distancia |
|---|---|---|---|---|
| 1 | 6801.54 km | – | 1.00 km | – |
| 2 | 6802.52 km | 6802.52 - 6801.54 = 0.98 km | 1.00 km | 1.000 km |
| 3 | 6803.51 km | 6803.51 - 6802.52 = 0.99 km | 1.00 km | 1.020 km |
| 4 | 6804.00 km | 6804.00 - 6803.51 = 0.49 km | 0.50 km | 0.500 km |
| 5 | 6804.20 km | 6804.20 - 6804.00 = 0.20 km | 0.50 km | 0.160 km |
| 6 | 6804.20 km | 6804.20 - 6804.20 = 0.00 km | 0.00 km | - |
Los valores son aproximadamente iguales, por lo que se puede suponer que los parámetros para ambos sensores se han elegido correctamente. Tenga en cuenta que diferentes sensores pueden tener diferentes precisiones. En tal caso, en el Contador de kilometraje y la Detección de viajes se recomienda utilizar el sensor que envía lecturas más cercanas a las esperadas.
Sensores de combustible
Actualmente en Wialon existen varios tipos de sensores de combustible:
El Sensor del consumo de combustible absoluto (SCCA) muestra el consumo de combustible durante todo el período de operación de la unidad. Por lo tanto, para obtener datos sobre el consumo durante un período específico, se utiliza el siguiente algoritmo: se calcula la diferencia entre las lecturas del sensor al final y al principio del intervalo considerado.
El Sensor del consumo de combustible instantáneo (SCCI) muestra la cantidad de combustible consumido desde la medición (mensaje) anterior. Por lo tanto, para obtener datos sobre el consumo durante un período específico, se utiliza el siguiente algoritmo: se calcula la suma de las lecturas del sensor en todos los mensajes en el intervalo considerado.
El Sensor impulsivo del consumo de combustible (SICC) tiene el principio de funcionamiento similar al SCCI.
El Sensor de nivel de combustible (SNC) está diseñado para calcular la cantidad de combustible en el tanque. Se puede utilizar para calcular el consumo, así como para controlar las descargas y llenados de combustible.
El Sensor impulsivo del nivel de combustible (SINC), al igual que el sensor anterior, está diseñado para calcular la cantidad de combustible en el tanque. Se puede utilizar para calcular el consumo, así como para controlar las descargas y llenados de combustible. La diferencia con el SNC es que en el cálculo se utilizan datos del mensaje anterior, y la diferencia de valores de impulsos de dos mensajes adyacentes se divide por la diferencia de tiempo entre ellos. Este tipo de sensor casi no se utiliza en la práctica; en su lugar, la mayoría de los usuarios prefieren un SNC normal.
La información sobre el combustible puede estar contenida en parámetros con los siguientes nombres: fuel_lvl, fuel_used, cons_total, can_fuel, rs485_lls, adc1, adc2, etc.
La elección del tipo de sensor debe basarse en cómo cambia el valor del parámetro. Consideremos diferentes comportamientos de los parámetros a continuación.
Sensor del consumo de combustible absoluto
El parámetro se puede utilizar en el Sensor del consumo de combustible absoluto si:
- su valor no cambia cuando el motor no está funcionando;
- su valor aumenta durante el funcionamiento del motor;
- su valor crece más rápidamente durante el movimiento o el trabajo bajo carga que durante la parada o la ausencia de carga.
Sensor del consumo de combustible instantáneo y Sensor impulsivo del consumo de combustible
El parámetro se puede utilizar en el Sensor del consumo de combustible instantáneo o en el Sensor impulsivo del consumo de combustible si:
- es igual a cero cuando el motor no está funcionando;
- tiene un valor positivo cuando el motor está funcionando;
- tiene valores aproximadamente iguales cuando la unidad se mueve a la misma velocidad o trabaja bajo la misma carga.
Sensor de nivel de combustible
El parámetro se puede utilizar en el Sensor de nivel de combustible si:
- su valor no cambia cuando el motor no está funcionando;
- su valor disminuye gradualmente cuando el motor está funcionando;
- su valor cae más rápidamente durante el movimiento o el trabajo bajo carga que durante la parada o la ausencia de carga;
- su valor fluctúa alrededor del valor real durante el funcionamiento del motor y el movimiento;
- su valor aumenta bruscamente durante el llenado.
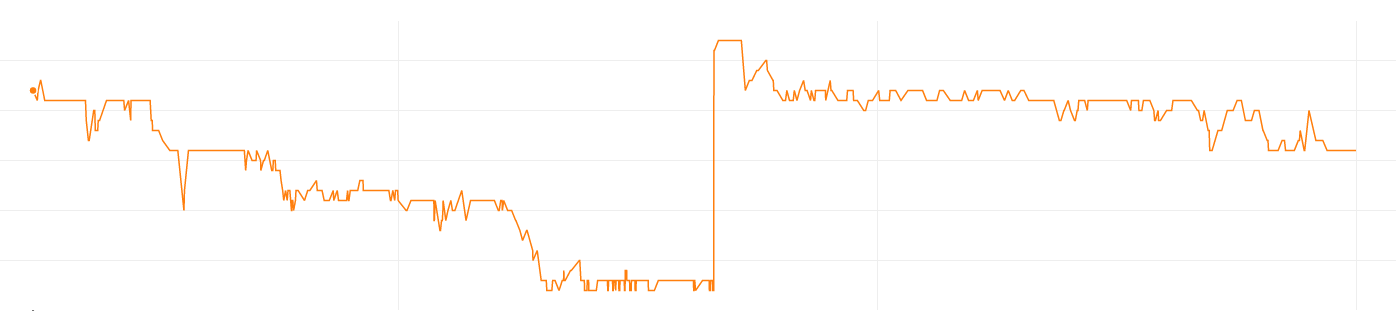
A continuación se muestra un ejemplo de gráfica con los cambios del parámetro SNC que contiene intervalos de viaje y llenados de combustible.