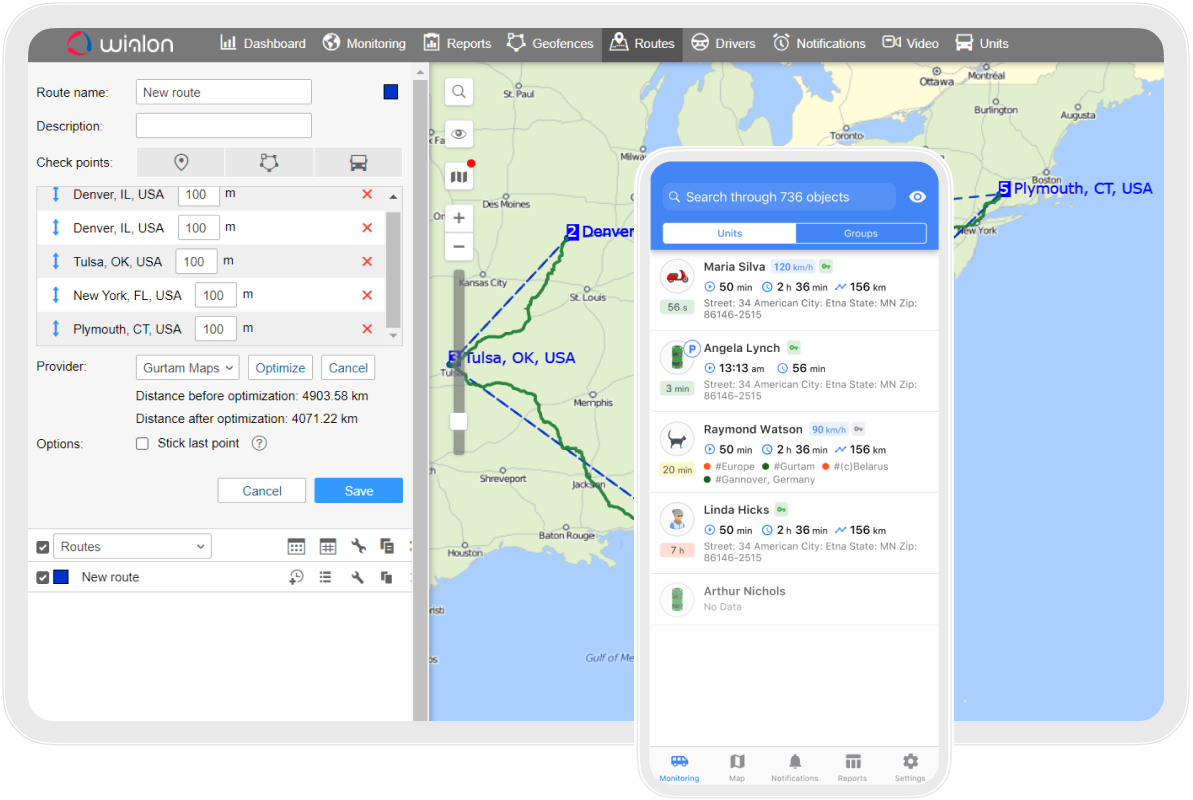
Wialon Hosting
Cloud-based version of Wialon, the ultimate solution for fleet digitalization, designed to streamline operations and enhance efficiency for various fleets — from cars and trucks to heavy vehicles and machinery.
Popular pages
Expert articles
All expert articles "Feb 03, 2022"How to choose the number of digital input/output (I/O)
 Oleg Zharkovsky,
Customer Service Engineer
Oleg Zharkovsky,
Customer Service Engineer
Sensors: Calculation table explained
Oleg Zharkovsky,
Customer Service Engineer
Math Consumption
Oleg Zharkovsky,
Customer Service Engineer