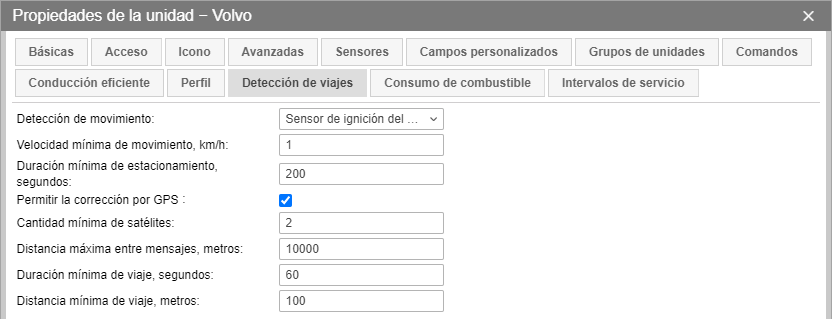
Detección de viajes
El detector de viajes se ajusta en las propiedades de unidad y se utiliza para crear los intervalos de movimiento y estacionamientos. De acuerdo con el dispositivo y las propiedades en esta pestaña, los informes que dependen de intervalos de movimiento y estacionamientos pueden ser muy diferentes. Por esto los ajustes configurados aquí deben ser correctos.
Los derechos de acceso necesarios: Ver detalle de propiedades del objeto para ver la pestaña; Modificar detección de viajes y consumo de combustible para modificar la pestaña.
Detección de movimiento
De momento existen 5 métodos básicos para detectar movimiento.
| Método | Descripción |
|---|---|
| Velocidad GPS | Puede utilizarse para cualquier dispositivo. La división de movimiento en intervalos se realiza de acuerdo con los parámetros descritos abajo. |
| Coordenadas GPS | Puede emplearse para los dispositivos que solo envían datos sobre la localización, ya que la velocidad no se toma en cuenta mientras determinar movimiento. Se detecta un movimiento si no coinciden las coordenadas entre dos mensajes sucesivos. Este método para detectar movimiento siempre se utiliza junto con la corrección por GPS (véase abajo). |
| Sensor de ignición del motor | Solo está disponible en caso de haber un sensor del tipo del mismo nombre. El movimiento se fija cuando se cumplen dos condiciones: se activa el sensor de ignición y se recibe un mensaje con una velocidad igual o mayor que la velocidad mínima de movimiento. El final del movimiento se fija al desactivarse el sensor o al recibirse un valor de velocidad menor de la velocidad mínima de movimiento indicada. Se interrumpe también si se ha superado el tiempo de espera. |
| Sensor de kilometraje | Solo está disponible en caso de haber un sensor del tipo del mismo nombre. El sensor tiene que enviar el valor de kilometraje absoluto. El movimiento se fija al aumentarse los valores del sensor de kilometraje y al recibirse un mensaje con una velocidad igual o mayor que la velocidad mínima de movimiento. Además, si el parámetro de velocidad falta o es inválido, el estado de movimiento se determina solo de acuerdo con el aumento de valores del sensor de kilometraje. |
| Odómetro relativo | Solo está disponible en caso de haber un sensor del tipo del mismo nombre. El odómetro relativo muestra la distancia que ha viajado una unidad desde el mensaje anterior. Un movimiento se fija cuando en un mensaje viene un valor del odómetro relativo que sea mayor de cero y una velocidad que sea igual o mayor de la velocidad mínima de movimiento. Además, si el valor falta o es inválido, el estado de movimiento se determina solo de acuerdo con el aumento de valores del odómetro relativo. |
Una vez ajustado el método principal para determinar el movimiento, hay que examinar los ajustes de abajo. Estos ajustes permiten determinar viajes, paradas y estacionamientos.
Determinación de intervalos de movimiento
Velocidad mínima de movimiento
Indique la velocidad mínima que tiene que considerarse como el inicio de movimiento. Esto se necesita para excluir emisión de coordenadas. Un dispositivo puede determinar las coordenadas con inexactitud insignificante, y por esto puede detectarse una velocidad pequeña de una unidad parada. Si usted indica la velocidad mínima, se excluirá la posibilidad de que la recepción de coordenadas con una inexactitud insignificante influya en la visualización de estos datos en función de un viaje. Tal intervalo será incluido en paradas o estacionamientos. Mientras determinar viajes según un sensor (de ignición, por ejemplo), este parámetro influye en la detección de paradas en márgenes de viajes.
Duración mínima de estacionamiento
Aquí se indica cuánto tiempo (en segundos) debe estar parada la unidad para que se considere un estacionamiento (y no una parada) este intervalo. Este parámetro permite incluir el tiempo pasado en embotellamientos, semáforos o encrucijadas en un viaje (y no dividirlo). Sin embargo, si durante un viaje el tiempo entre dos mensajes consecutivos supera este parámetro, el viaje se divide en dos. Mientras detectar viajes según un sensor (de ignición, por ejemplo), este intervalo se aplica solo a los intervalos con el sensor desactivado o con la velocidad menor de la velocidad mínima de movimiento. Si está activada la opción Permitir la corrección por GPS, el valor de este campo tiene que ser superior de 10 segundos. Preste atención a que para que se fije la duración de un estacionamiento, se necesita recibir de la unidad al menos 2 mensajes con una velocidad menor que la velocidad mínima de movimiento.
Permitir la corrección por GPS
Para los primeros dos tipos de detección de movimiento esta opción es obligatoria. En otros casos la corrección por GPS puede ser activada adicionalmente si el movimiento se detecta según el sensor de trabajo del motor. Si el movimiento se detecta por el odómetro y dispositivos parecidos, es mejor, que desactive la corrección por GPS. Para utilizarla, hay que activar la opción Permitir la corrección por GPS y ajustar los parámetros que se describen a continuación.
Cantidad mínima de satélites
Indique la cantidad mínima de satélites para detectar un viaje. La cantidad mínima recomendada es 3, pero para algunos tipos de dispositivos 2 son bastantes.
Distancia máxima entre mensajes
El ajuste se utiliza en la siguiente situación: si una unidad ha movido por una distancia mayor de la indicada desde el mensaje anterior hasta el actual, el intervalo anterior será terminado y será iniciado otro. El valor de este campo no debe ser menor de 50 metros.
Duración mínima de viaje
El ajuste está destinado a excluir emisiones de datos incorrectos. Por ejemplo, un coche aparcado se ha movido y se ha fijado movimiento durante 40 segundos. Para que tal situación no se considere un viaje, se ajusta este parámetro que muestra el lapso durante el cual tiene que moverse una unidad para que esto se considere inicio de movimiento.
Distancia mínima de viaje
El ajuste se indica para que no se consideren viajes movimientos a unos metros causados por la inexactitud admisible del dispositivo. Por ejemplo, un coche aparcado envía coordenadas de acuerdo con las cuales se está moviendo por unos metros. Para que esto no se considere un viaje, hay que indicar la distancia mínima de viaje.