Trip Detector
To view information on the Trip Detector tab, you must have the Read only preset of access rights. To make and save changes to the tab, the user must have full access.
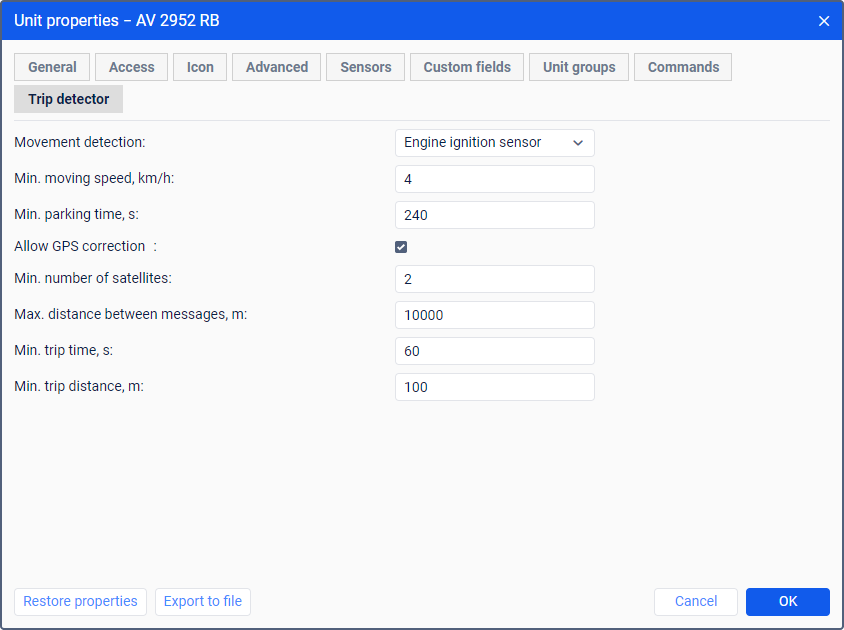
On this tab, you can select the method which should be used to detect movement and specify parameter values which should be taken into account in trip, stop and parking intervals.
Movement detection methods
In the drop-down list, select one of the five available methods for detecting movement.
| Method | Description |
|---|---|
| GPS speed | This method can be used for all types of devices. If you select it, the Allow GPS correction option is always enabled. The intervals of movement are detected according to the parameters described in the table below. |
| GPS coordinates | This method can be used for devices which send only location data because speed is not taken into account when detecting movement by this method. The difference in coordinates between two successive messages is considered as movement. If you select this method, the Allow GPS correction option is always enabled. |
| Engine ignition sensor | This method is available only if the unit has a sensor of the same-name type. The movement is detected when these two conditions are fulfilled:
The movement is terminated in case of disconnecting the engine ignition sensor, receiving a speed value which is less than the minimum one, or exceeding the specified timeout. |
| Mileage sensor | Not applicable in the system. |
| Relative odometer | Not applicable in the system. |
Movement parameters
After you select the movement detection method, specify values of parameters which should be taken into account in trip, stop and parking intervals.
| Parameter | Description |
|---|---|
Min. moving speed | The minimum speed value which should be considered as the beginning of movement. It is specified so that the outliers of GPS coordinates and device errors are not considered as movement when the unit is parked. The specified value is also taken into account in the intervals of stops and parkings. When detecting trips by an ignition sensor, the value is taken into account in the intervals of stops during the trips. |
| Min. parking time | To determine the interval of parking, specify the minimum number of seconds during which the unit should be motionless in order for the system to consider it as parked. The specified value allows including the stops of the unit (for example, waiting times at traffic lights, stops in traffic jams, etc.) in the trip interval without completing it. If during a trip the time between two successive messages is greater than or equal to the specified value, the trip completes, and a new one begins. When detecting trips by an ignition sensor, the specified value is applied only to intervals with the disconnected sensor or with a speed value which is less than the specified minimum moving speed. If the Allow GPS correction option is disabled, the minimum value of this parameter should be 10 seconds. To determine the parking duration, the unit should send at least two messages with speed values which are less than the specified minimum moving speed. |
Allow GPS correction | This option is always enabled for the GPS speed and GPS coordinates movement detection methods. It is advisable to enable the option if the movement is detected by an ignition sensor. If the option is enabled, you should specify the values of the four parameters described below. |
| Min. number of satellites | Specify the minimum number of available satellites to detect a trip. The recommended number is at least four. |
| Max. distance between messages | Specify the maximum distance in meters between two messages which the unit should travel in order to complete the movement interval and begin a new one. The minimum value is 50 meters. |
| Min. trip time | Specify the minimum movement time in seconds which should be considered as a trip. This is required in order to exclude false detections of trips, for example, during short movements in a car park or traffic jam. |
| Min. trip distance | Specify the minimum distance in meters which the unit should travel so that its movement is considered a trip. This is required in order to exclude possible equipment errors when determining the unit location. |