Eco Driving
Driving behavior influences the condition of a transported cargo, as well as the technical condition of a vehicle used. Wialon system possesses the functionality that allows receiving an assessment of the driving quality. The functionality helps to evaluate how a driver treats the entrusted vehicle, and as a result, improve the safety of driving, prolong the life of the vehicle fleet, reduce fuel costs, and ensure the safety of the cargo.
With these settings configured correctly, you can execute the special Eco driving report as well as include columns with penalties and general rating into many other reports.
The required access rights: View detailed item properties to view the tab; Edit trip detector and fuel consumption to edit the tab.
Settings
The Eco driving tab is a form where you should indicate the parameters used for penalty scoring. To add the eco-driving criteria, choose one of two options: use a preset criterion of one of the available templates or customize your own.
In the top left part of the Eco driving tab window, select one of the three available templates: Automobile, Truck, Bus.
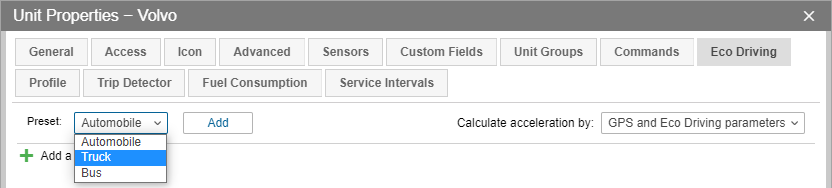
Click Add. Below appears a list of preset criteria for the selected transport type (if there are already criteria set for the unit, the criteria from the list is added to the existing ones). Select the required criterion and click the button in the shape of the wrench to change it. Press Save.
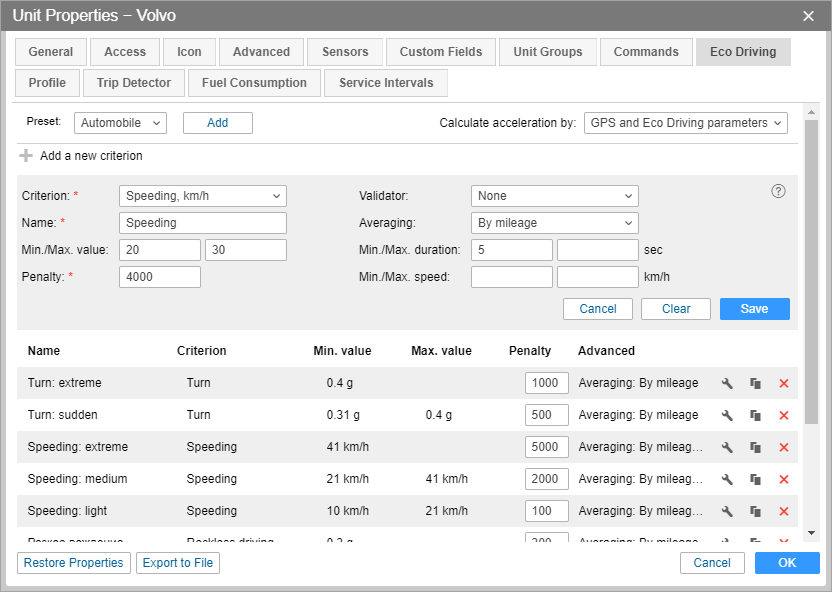
To add your own criteria, press Add a new criterion and fill in the required fields. Parameters are conditionally divided into 2 types: key parameters (obligatory fields, marked with an asterisk), and additional (optional) ones. Key parameters include criterion, name, sensor (if the Custom criterion is chosen), and penalty value. In addition, here you can specify the minimum/maximum violation value. Additional parameters include validator, multiplier, averaging, minimum/maximum duration, and speed. After filling out the form, you can either save the selected criterion with its name and individual parameters or clear the form using the corresponding button.
To calculate acceleration (speedup, slowdown, turn, and reckless driving), the system uses different methods of data analysis: the GPS or Eco Driving parameters or a combined one (the GPS and Eco Driving parameters). By default, the data is analyzed on the basis of the combined method. When choosing GPS, the calculation of acceleration is made based on the positional data. When choosing Eco Driving parameters, the calculation is made in accordance with special parameters, which contain maximum acceleration value for the period between the messages. Only some devices can transfer these parameters. If the GPS and Eco Driving parameters are chosen together, acceleration calculation is made based on both the positional data and special parameters. Afterwards, the system chooses the biggest value. Note that the chosen method is applied to all the configured criteria.
Criteria
The criterion is a key parameter on the basis of which a driving quality can be determined. Wialon system supports the work with the following criteria: speeding, acceleration, braking, turning, reckless driving, and a custom one. Detailed information on every criterion is presented below.
Speeding
In the corresponding fields indicate a speeding value (minimum — maximum) in km/h which should be detected as a violation, and also a penalty value charged for this violation. Moreover, additionally, you can select a validator (multiplier), averaging, and also indicate min/max duration and min/max speed at which a violation is detected. Note that speedings are detected by the road speed limits (provided that the road limit is more than 30 km/h). However, in additional settings, it is possible to specify the min/max speed at which the violation is fixed.
Acceleration
This parameter is used to detect unreasonably hard vehicle speedups. In the corresponding fields, indicate an acceleration value (min — max) measured in g which should be detected as a violation, and also a penalty value charged for this violation. Moreover, additionally, you can select a validator (multiplier), averaging, and also indicate min/max duration and min/max speed at which a violation is detected. Such option as min/max speed can be applied, for example, in order to exclude low-speed accelerations from a report.
Braking
This parameter is used to detect unreasonably hard deceleration of the vehicle. In the corresponding fields indicate a braking value (min — max) measured in g which should be detected as a violation, and also a penalty value charged for it. Also, additionally, you can choose a validator (multiplier), averaging, and also indicate min/max duration and min/max speed at which a violation is detected. Such an option as the min/max speed can be applied, for example, in order to exclude low-speed braking from the report.
Turn
This parameter helps to evaluate the quality of passing the maneuver on the basis of the course during the turn, as well as the acceleration of the vehicle. In the corresponding fields indicate a value (min — max) measured in g which should be detected as a violation, and also a penalty value charged for this violation. Moreover, additionally, you can choose a validator (multiplier), averaging, and also indicate the min/max duration and min/max speed on which a violation is detected.
Reckless Driving
This parameter is used to detect unreasonably hard accelerations prior to deceleration. In the corresponding fields, indicate a value (min — max) measured in g which should be detected as a violation, and also a penalty value charged for it. Also, additionally, you can choose a validator (multiplier), averaging, and also indicate the min/max duration and min/max speed at which a violation is detected.
According to the indicated settings the system detects so-called peaks of violations, afterwards sets the value for every peak, and also identifies intervals on which the peaks can be found. Furthermore, if you have several Reckless driving criteria with different violation settings, the system determines which one of them suits most. Afterwards, the filters indicated in the additional parameters section are triggered:
-
min/max speed — on the basis of the received parameters, the system determines the maximum speed on the interval. Then the calculated speed is compared to the indicated speed range. If the calculated speed matches this filter, such a violation gets into the report. Otherwise, it is not included.
-
min/max duration — if the duration of the criterion exceeds the minimum duration value indicated in the filter, such a violation gets into the report. If the duration of the criterion exceeds the maximum duration value, the penalty is multiplied by the number of maximum values detected on the violation interval.
As has been mentioned before, a validator (multiplier) can be used for this criterion. The basic principles of using the validator (multiplier) are described below, in the Additional parameters section.
Custom
This parameter uses any sensor created in the system for a violation detection. Using a custom criterion, it is necessary to select a sensor itself (from the dropdown list), indicate the min/max violation value, and a penalty charged for it. Afterwards, you can choose a validator (multiplier), averaging, and indicate the min/max duration and min/max speed at which a violation is detected.
Key parameters
Criterion
Violation type (speeding, acceleration, braking, turn, reckless driving, custom).
Name
Any name for the criterion chosen above. It is considered to be an obligatory field because the system allows the same criterion to be chosen multiple times.
Penalty
A number of penalty points charged for the violation of such type.
Sensor
This parameter is available upon choosing the Custom criterion. Any sensor created for the unit can be used. Violations are registered using the values of the chosen sensor. Note that when working with a digital sensor you can indicate additional settings:
Violations from device. When this checkbox is activated, the duration of the violation coincides with the interval of the sensor operation (from on to off).
Min/max value
It is a range of violation values. If the received parameter value falls within the range, a violation is recorded (minimum value is included into the range, and the maximum is not).
For all the criteria except the custom one, the integration of intervals can be applied. In other words, if a repeated violation occurs during 10 seconds after the end of the primary one, then both these violations will be connected into one.
When evaluating the driving behavior, the speeding is determined by road limits.
Additional parameters
Validator
One of the sensors created for the unit, which is used to confirm or deny the incoming values by the selected criterion. The violation gets into the report upon receiving a positive value from the validator. Otherwise, the violation is not included into it.
Moreover, if you check the Multiplier box, the sensor chosen as a validator is used as a coefficient, multiplying the penalty score.
Here it is an example. If the main objective of the company is to provide the safety of the cargo during its transportation, the severity of violation evaluation should become higher. It is necessary to create a weight sensor and use it as a validator-multiplier. 0 value is received when the vehicle is empty, any positive value received for the loaded one. So, in case of speeding by the loaded vehicle, the penalty value is multiplied by the value of the validator.
Min/max duration, sec
The range of the duration of the criterion (from — to) at which a violation is recorded. If the duration of the criterion exceeds the minimum value indicated in the duration range, such a violation gets into the report. If the duration of the criterion exceeds the maximum value indicated in the duration range, the penalty is multiplied by the number of maximum values detected on the violation interval.
Min/max speed, km/h
The speed range (from — to) at which a violation is recorded. The system determines the maximum speed at a violation interval. Afterwards, this speed is compared with the specified range values. If the determined speed matches the indicated speed range, such a violation gets into a report. Otherwise, it is not included.
Averaging
Three options for working with averaging are described below.
Averaging is disabled. The penalty points received for the trip are summarized. Besides, they are accumulated in a linear progression. So, the bigger the trip interval is, the more violations can be registered.
However, this method does not match everyone. Therefore, it is possible to connect penalties with time or mileage intervals, and receive the average value of penalty points for the interval.
Averaging by mileage. Using the averaging by mileage, the total amount of penalty points is divided by the mileage of the trip. Therefore, as a result, we receive the average amount of penalty points for every kilometer of the trip.
Averaging by time. Using the averaging by time, the total amount of penalty points for the trip is divided by the duration of the trip. Therefore, as a result, we receive the average amount of penalty points for every minute of the trip.
If a trip is less than 1 kilometer, averaging by mileage or by time cannot be applied to the trip.