Качество вождения
Качество вождения влияет на состояние перевозимого груза, а также на техническое состояние используемого транспортного средства. Система Wialon располагает функционалом, который позволяет получить оценку качества вождения. Данный функционал помогает оценить, как водитель обращается с вверенным ему транспортным средством, и в результате повысить безопасность вождения, продлить ресурс используемого автопарка, уменьшить расходы на топливо и гарантировать сохранность груза.
Если данная вкладка настроена корректно, это позволяет выполнить специальный отчет Качество вождения, а также включить столбцы со штрафными баллами и общей оценкой во многие другие отчеты.
Необходимый доступ: Просмотр подробных свойств — для просмотра вкладки, Изменение детектора поездок и расхода топлива — для редактирования вкладки.
Настройки
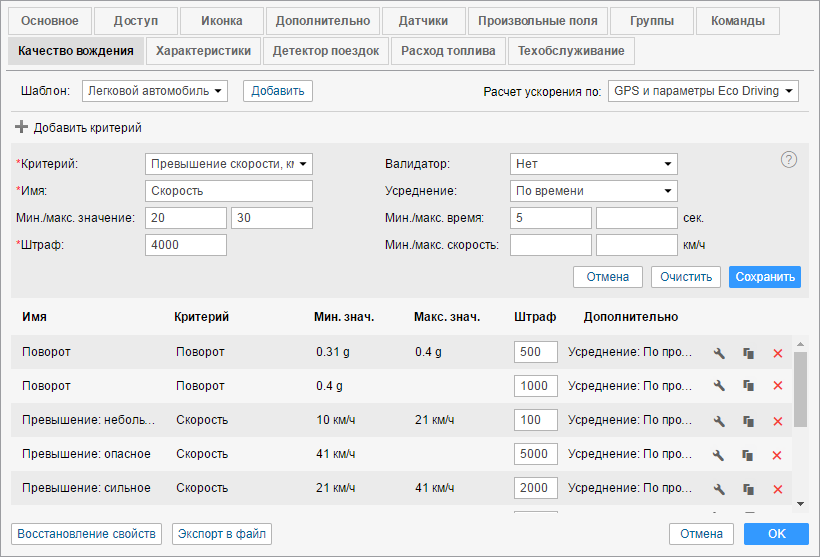
Вкладка Качество вождения представляет собой форму, в которой необходимо ввести параметры, используемые при выставлении оценок. Чтобы добавить критерии качества вождения, выберите один из двух вариантов: использовать предустановленный критерий из одного из доступных шаблонов или настроить свой собственный.
На вкладке Качество вождения в верхней левой части окна выберите один из трех доступных шаблонов: Легковой автомобиль, Грузовой автомобиль, Автобус.
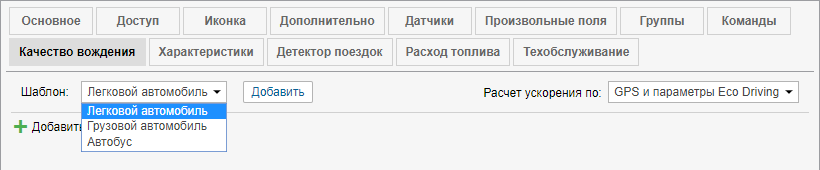
Нажмите кнопку Добавить. Ниже появится список предустановленных критериев для выбранного типа транспорта (если для объекта есть уже настроенные критерии, то критерии из списка будут добавлены к уже существующим). Выберите необходимый критерий и нажмите на кнопку в форме гаечного ключа, чтобы изменить его. Нажмите Cохранить.
Чтобы добавить свои критерии, нажмите на кнопку Добавить новый критерий и заполните необходимые поля. Параметры условно разделены на 2 типа: ключевые (обязательные для заполнения, отмечены звездочкой) и дополнительные (опционные для заполнения). К ключевым параметрам относятся критерий, имя, датчик (при выборе произвольного критерия), а также штраф. Кроме того, здесь вы можете указать минимальное/максимальное значение нарушения. Дополнительные параметры включают валидатор, мультипликатор, усреднение, диапазон времени, а также диапазон скорости. После заполнения формы можно сохранить выбранный критерий, задав ему имя и индивидуальные параметры, или очистить форму при помощи соответствующей кнопки.
Для расчета ускорений (увеличение/снижение скорости, поворот, а также резкое вождение) системой предусмотрено использование различных методов анализа данных: GPS, параметры Eco Driving и комбинированный (GPS и параметры Eco Driving). По умолчанию данные анализируются на основании комбинированного метода. При выборе GPS расчет ускорения производится по позиционным данным. При выборе параметров Eco Driving расчет производится на основании специальных параметров, которые содержат максимальные значения ускорений за период между сообщениями. Данные параметры передают только некоторые приборы. Если выбран GPS и параметры Eco Driving, то расчет ускорения производится как по позиционным данным, так и на основании специальных параметров, а затем система выбирает большее значение. Следует отметить, что выбранный метод применяется сразу для всех настроенных критериев.
Критерии
Критерий — это основной параметр, который служит для определения качества вождения. Система Wialon позволяет работать со следующими критериями: превышение скорости, ускорение, торможение, поворот, резкое вождение, а также произвольный критерий. Далее остановимся на каждом из них более подробно.
Превышение скорости
В соответствующих полях выставляются значения превышения (минимальное — максимальное) в км/ч, которые будут фиксироваться как нарушение, а также штрафной балл, начисляемый за данное нарушение. Кроме того, в качестве дополнительных параметров можно указать валидатор (мультипликатор), усреднение, а также мин./макс. время и мин./макс. скорость, на которых фиксируется нарушение. Следует учитывать, что при оценке качества вождения превышения скорости определяются по дорожным ограничениям (при условии, что дорожное ограничение более 30 км/ч). Однако, есть возможность в дополнительных настройках указать мин./макс. скорость, на которой фиксируется нарушение.
Ускорение
Параметр, который служит для определения неоправданно резкого разгона транспортного средства. В соответствующих полях выставляются значения (минимальное — максимальное) в g, которые будут фиксироваться как нарушение, а также штрафной балл, начисляемый за данное нарушение. Кроме того, в качестве дополнительных параметров можно указать валидатор (мультипликатор), усреднение, а также мин./макс. время и мин./макс. скорость, на которых фиксируется нарушение. Такой параметр как мин./макс. скорость может применяться, когда, например, необходимо убрать из отчета ускорения на низких скоростях.
Торможение
Параметр, который служит для определения неоправданно резкого снижения скорости транспортного средства. В соответствующих полях выставляются значения (минимальное — максимальное) в g, которые будут фиксироваться как нарушение, а также штрафной балл, начисляемый за данное нарушение. Кроме того, в качестве дополнительных параметров можно указать валидатор (мультипликатор), усреднение, а также мин./макс. время и мин./макс. скорость, на которых фиксируется нарушение. Такой параметр как мин./макс. скорость может применяться, когда, например, необходимо убрать из отчета торможения при движении на низких скоростях.
Поворот
Параметр, который на основании курса при прохождении поворота, а также ускорения транспортного средства позволяет оценить качество прохождения данного маневра. В соответствующих полях выставляются значения (минимальное — максимальное) в g, которые будут фиксироваться как нарушение, а также штрафной балл, начисляемый за данное нарушение. Кроме того, в качестве дополнительных параметров можно указать валидатор (мультипликатор), усреднение, а также мин./макс. время и мин./макс. скорость, на которых фиксируется нарушение.
Резкое вождение
Параметр, который служит для определения неоправданно резкого разгона транспортного средства с последующим снижением скорости. В соответствующих полях выставляются значения (минимальное — максимальное) в g, которые будут фиксироваться как нарушение, а также штрафной балл, начисляемый за данное нарушение. Кроме того, в качестве дополнительных параметров можно указать валидатор (мультипликатор), усреднение, а также мин./макс. время и мин./макс. скорость, на которых фиксируется нарушение.
В соответствии с заданными настройками система фиксирует так называемые пики нарушений, затем выставляет для каждого пика значение, а также распознает и фиксирует интервалы, на которых присутствуют найденные пики. Далее, если у Вас имеется несколько критериев резкого вождения с различными настройками превышения значения, то система определяет, под какой именно критерий подходит данное нарушение. После этого срабатывают фильтры, которые были выставлены в дополнительных параметрах:
- мин./макс. скорость — исходя из полученных параметров система определяет максимальную скорость на интервале. Затем рассчитанная скорость сравнивается с введенными Вами значениями скорости и, если подходит под введенный фильтр, то данное нарушение попадает в отчет. В обратном случае данное нарушение в отчет не попадет.
- мин./макс. время — если длительность критерия превышает минимальное значение, указанное в фильтре, то данное нарушение попадает в отчет. Если же длительность критерия превышает максимальное значение, указанное в фильтре, то штраф умножается на количество максимальных значений за интервал нарушения.
Как уже говорилось ранее, для данного критерия может использоваться валидатор (мультипликатор). Общий принцип работы валидатора (мультипликатора) описывается ниже, в разделе Дополнительные параметры.
Произвольный
Параметр, который для определения нарушения использует любой созданный Вами датчик. Для произвольного критерия необходимо выбрать из выпадающего списка сам датчик, а также указать мин./макс. значение и штраф, начисляемый за нарушение. В качестве дополнительных параметров можно указать валидатор (мультипликатор), усреднение, а также мин./макс. время и мин./макс. скорость, на которых фиксируется нарушение.
Ключевые параметры
Критерий
Тип нарушения (превышение скорости, ускорение, торможение, поворот, резкое вождение, произвольный).
Имя
Условное название для выбранного Вами критерия. Является необходимым параметром по причине того что один и тот же критерий может быть выбран любое количество раз.
Штраф
Количество штрафных баллов, начисляемых за нарушение данного типа.
Датчик
Данный параметр доступен только при выборе произвольного критерия. Может быть использован любой созданный для объекта датчик. Нарушения фиксируются по значениям выбранного Вами датчика. Следует отметить, что при работе с цифровым датчиком появляется возможность выставить дополнительные настройки:
Нарушения по устройству — при активации данного флага длительность нарушения совпадает с интервалом работы датчика (от включения до выключения).
Мин./макс. значение
Выставляемый диапазон значений. Если приходящее значение параметра попадает в данный диапазон, то фиксируется нарушение (минимальное значение включается в диапазон, а максимальное нет).
Для критериев кроме произвольного может быть применено объединение интервалов. Другими словами, если в течение 10 секунд после окончания нарушения будет зафиксировано повторное нарушение по данному критерию, то эти нарушения будут объединены в одно.
При оценке качества вождения превышение скорости определяется по дорожным ограничениям.
Дополнительные параметры
Валидатор
Один из созданных для объекта датчиков, который применяется для подтверждения или опровержения приходящих значений по выбранному критерию. Нарушение попадает в отчет при получении хотя бы одного положительного значения валидатора. В обратном случае нарушение в отчет не попадает.
Кроме того, при выставлении соответствующего флага (Мультипликатор) выбранный в качестве валидатора датчик используется как коэффициент, приумножающий штрафной балл за качество вождения.
Рассмотрим пример. Если наибольшей ценностью для компании является сохранность груза при его транспортировке, то в таком случае строгость оценки качества вождения возрастает. Необходимо создать датчик веса и использовать его в качестве валидатора-мультипликатора. Датчик будет принимать значение 0, когда автомобиль не загружен, и положительное значение, когда автомобиль перевозит груз. В таком случае при превышении скорости груженым авто значение штрафа будет умножаться на значение валидатора.
Мин./макс. время, сек.
Диапазон длительности критерия (от — до), на котором фиксируется нарушение. Если длительность критерия превышает минимальное значение, указанное в диапазоне, то данное нарушение попадает в отчет. Если же длительность критерия превышает максимальное значение, указанное в диапазоне, то штраф умножается на количество максимальных значений за интервал нарушения.
Мин./макс. скорость, км/ч
Диапазон скорости (от — до), на котором фиксируется нарушение. Система определяет максимальную скорость на интервале нарушения. Затем эта скорость сравнивается с указанными значениями диапазона. Если данная скорость подходит под введенный фильтр, то нарушение попадает в отчет. В обратном случае нарушение в отчет не попадет.
Усреднение
Существует 3 варианта работы с усреднением.
Функция усреднения отключена. Полученные за поездку баллы просто суммируются. Таким образом, штрафные баллы накапливаются в линейной прогрессии. То есть, чем больше интервал поездки, тем больше на нем может быть зафиксировано нарушений.
Однако этот способ подходит не всем. Поэтому есть возможность привязать штрафы к временным отрезкам или к отрезкам пройденного пути и получить среднее значения штрафных баллов за отрезок.
Усреднение по пробегу. При использовании усреднения по пробегу общее количество штрафных баллов делится на пробег за поездку. То есть, в результате усреднения мы получаем среднее количество штрафных баллов за каждый километр пробега.
Усреднение по времени. При использовании усреднения по времени общее количество штрафных баллов за поездку делится на длительность поездки. Таким образом, в результате данного усреднения мы получаем среднее количество штрафных баллов за каждую минуту поездки.
Усреднение по пробегу и времени не применяется к поездкам короче 1 минуты.