Detección de viajes
Para trabajar con la pestaña Detección de viajes, se requieren los siguientes derechos de acceso:
- Ver detalle de propiedades del objeto, para ver la pestaña;
- Modificar detección de viajes, para modificar la pestaña.
Los parámetros de detección de viajes se utilizan para determinar intervalos de movimiento, viajes, paradas y estacionamientos.
Para trabajar con esta pestaña, consulte los siguientes conceptos:
| Concepto | Descripción |
|---|---|
| Movimiento | El movimiento son los intervalos en los que la velocidad ha sido mayor o igual al valor indicado en el campo Velocidad mínima de movimiento. Cada mensaje de la unidad se analiza por separado. Sin embargo, si se ha escogido el método de detección de movimiento Coordenadas GPS, se entiende por movimiento coordenadas distintas en dos mensajes seguidos. |
| Viaje | El viaje es un intervalo durante el cual se cumplen las condiciones de todos los parámetros de detección de viajes. Estas condiciones dependen del método de detección de movimiento escogido y se describen en la tabla a continuación. Al detectar viajes, se analiza no solo cada mensaje por separado, sino también su secuencia. Los intervalos de viajes pueden incluir paradas. |
| Parada | La parada es un intervalo durante el cual la velocidad ha sido menor que el valor del campo Velocidad mínima de movimiento, pero la duración de este intervalo ha sido menor que el valor del campo Duración mínima de estacionamiento. Cuando se detecta una parada, el viaje no se interrumpe. |
| Estacionamiento | El estacionamiento es un intervalo durante el cual la velocidad ha sido menor que el valor del campo Velocidad mínima de movimiento, pero la duración del cual ha sido mayor o igual al valor del campo Duración mínima de estacionamiento. Cuando se detecta un estacionamiento, el viaje se interrumpe. |
Los mensajes en los que datos se han determinado según LBS o puntos Wi-Fi no se consideran en la detección de viajes.
Métodos de detección de movimiento
El método de detección de movimiento determina cómo se detectan viajes. Los siguientes métodos están disponibles:
| Método | Descripción |
|---|---|
| Velocidad | Se puede utilizar este método para todos los tipos de dispositivos que envían valores de velocidad determinados según GPS u otra fuente. Si escoge este método, el viaje se detecta cuando se cumplen dos condiciones:
|
| Coordenadas GPS | Se puede utilizar este método para dispositivos que no envían valores de velocidad, pero envían datos de ubicación determinados según GPS. Si escoge este método, el viaje se detecta cuando se cumplen dos condiciones:
|
| Sensor de ignición del motor | Este método solo está disponible si la unidad tiene un sensor del tipo del mismo nombre. El viaje se detecta cuando se cumplen las siguientes condiciones:
El viaje finaliza si el sensor de ignición está desactivado o el valor de velocidad es menor que el valor mínimo. Asimismo, el viaje finaliza cuando se excede el tiempo de espera indicado para el sensor. |
| Sensor de kilometraje | Este método solo está disponible si la unidad tiene un sensor del tipo Sensor de kilometraje que envía el valor de kilometraje absoluto. El movimiento se detecta cuando se cumplen las siguientes condiciones:
Si el valor de velocidad es inválido o no está disponible, el estado de movimiento se determina cuando se aumentan los valores del sensor de kilometraje. |
| Odómetro relativo | Este método solo está disponible si la unidad tiene un sensor del tipo Odómetro relativo que determina la distancia recorrida desde que se ha recibido el último mensaje. El movimiento se detecta cuando se cumplen las siguientes condiciones:
Si el valor de velocidad es inválido o no está disponible, el estado de movimiento se determina cuando el valor del odómetro relativo no es igual a cero. |
Si está escogido el método Sensor de ignición, Sensor de kilometraje u Odómetro relativo, y la unidad tiene configurados varios sensores del tipo apropiado, se utiliza el sensor con el ID más bajo del sistema para determinar los viajes. Si no hay ningún sensor del tipo apropiado, se utiliza el método Velocidad en lugar del escogido.
Parámetros de movimiento
Una vez escogido el método de detección de movimiento, indique los valores de parámetros que deben tomarse en cuenta en los intervalos de viajes, paradas y estacionamientos.
| Parámetro | Descripción |
|---|---|
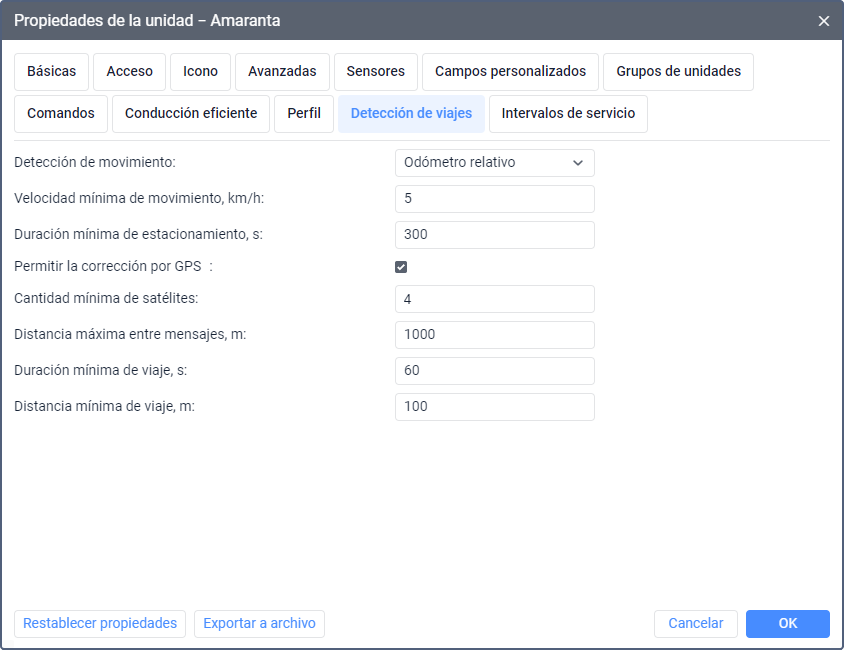
Velocidad mínima de movimiento | Valor mínimo de velocidad con el cual se debe considerar que la unidad está en movimiento. Se indica para que las emisiones de coordenadas GPS y errores de dispositivos durante la parada de la unidad no se consideren como movimiento. |
Duración mínima de estacionamiento | En este campo puede indicar cuánto debe estar sin movimiento la unidad para que esto se considere un estacionamiento. Si la unidad está inmóvil menos tiempo que la duración indicada, esto se considera una parada que forma parte del viaje. Si durante el viaje el tiempo entre dos mensajes sucesivos es mayor o igual al valor indicado, el viaje finaliza. Si la opción Permitir la corrección por GPS está activada, el valor mínimo de este parámetro debe ser 10 segundos. |
Permitir la corrección por GPS
La opción Permitir la corrección por GPS siempre está activada para los métodos Velocidad y Coordenadas GPS. Para los demás métodos, puede desactivarla.
Si la opción está activada, hay que indicar los valores de los siguientes parámetros:
| Cantidad mínima de satélites | Indique el número mínimo de satélites disponibles para detectar un viaje. El valor recomendado es no menos de cuatro. |
| Distancia máxima entre mensajes | Indique en metros la distancia máxima entre mensajes con la que el intervalo de movimiento corriente debe finalizar y comienza uno nuevo. |
| Duración mínima de viaje | Indique en segundos el tiempo de movimiento mínimo que debe considerarse un viaje. Es necesario para excluir las detecciones falsas de viajes, por ejemplo, durante movimientos cortos en aparcamientos o atascos. El parámetro se aplica a una secuencia de mensajes. |
| Distancia mínima de viaje | Indique en metros la distancia mínima que debe recorrer la unidad para que su movimiento se considere un viaje. Es necesario para excluir posibles errores del dispositivo al determinar la ubicación de la unidad. El parámetro se aplica a una secuencia de mensajes. |