Expresiones
El parámetro del sensor puede ser escrito mediante una expresión compuesta. Empleando tales parámetros, puede crear una gran variedad de sensores para atender a todas las necesidades y tareas. En una expresión se puede utilizar:
- parámetros del último mensaje (adc1, in1, etc.);
- parámetros del mensaje anterior (hay que poner el signo # antes de los mismos, por ejemplo, #adc1);
- control del parámetro bit a bit (param199:3, etc.);
- nombres de sensores (hay que indicarlos entre corchetes, por ejemplo, [Nivel de combustible]);
- parámetros constantes (const10, const-4.54, etc.);
- signos de operaciones aritméticas.
| Signo | Operación |
|---|---|
+ | suma |
− | resta |
∗ | multiplicación |
/ | división |
^ | potenciación (por ejemplo, ^const2 es elevar al cuadrado, ^const0.5 es tomar una raíz cuadrada) |
( ) | paréntesis de prioridad (por ejemplo, en la expresión const1.5*(param1−#param1) los paréntesis indican que primero se hace la resta y luego la multiplicación) |
| | |
: | conversión del parámetro |
Los parámetros del mensaje anterior no están disponibles:
-
para el sensor Modo privado y su validador,
-
para el sensor Asignación de conductor y su validador,
-
para sensores en notificaciones,
-
en las descripciones emergentes de gráficas,
-
en caso de la retransmisión de sensores.
Si uno de los parámetros incluidos en la expresión no es válido, tampoco es válida toda la expresión por completo.
Los valores de sensores se calculan en el siguiente orden:
- se calcula la expresión en el campo Parámetro,
- este valor se convierte según la tabla de cálculo (si está configurada),
- se realiza la validación (si está configurada).
Parámetro del sensor para determinar la velocidad a partir de las coordenadas
Esta sección describe cómo preparar una fórmula para el parámetro del sensor que permite determinar la velocidad de una unidad a partir de sus coordenadas. Un sensor con este parámetro resulta útil cuando el rastreador no envía el valores de velocidad, sino solo las coordenadas.
Tal sensor puede utilizarse solo en los informes (no en las notificaciones en línea) porque requiere los parámetros del mensaje anterior.
La fórmula completa se especifica en el campo Parámetro de las propiedades del sensor que se crea. El tipo de sensor debe ser Personalizado.
A continuación, se muestra un ejemplo de la fórmula lista para la ciudad de Vilnius y los pasos para prepararla. En su base, la velocidad se calcula como la distancia dividida por el tiempo.
(((lat-#lat)*const111.1365)^const2+((lon-#lon)*const64.3541)^const2)^const0.5/((time-#time)/const3600)
El cálculo de la velocidad utilizando esta fórmula se realiza en tres etapas:
- Calcular los coeficientes necesarios para convertir los valores de latitud y longitud en kilómetros, teniendo en cuenta la ubicación específica de la unidad.
- Determinar la distancia empleando el teorema de Pitágoras.
- Calcular la velocidad utilizando los datos obtenidos en la etapa 2.
Calcular coeficientes para los valores lat y lon
Los valores de latitud (lat) y longitud (lon) deben ser convertidos de grados a kilómetros. Para esto, es necesario calcular los coeficientes. El coeficiente para el valor de la longitud depende del lugar.
- Latitud (lat). La distancia cubierta por un grado de latitud varía ligeramente desde el ecuador hasta los polos: desde 110.579 kilómetros en el ecuador hasta 111.694 kilómetros en los polos. Para simplificar los cálculos, se puede usar el valor promedio: (110.579 + 111.694) / 2 = 111.1365.
- Longitud (lon). La distancia cubierta por un grado de longitud varía significativamente desde el ecuador hasta los polos: desde 0 kilómetros en los polos hasta 111.321 kilómetros en el ecuador. Esta distancia se calcula con la fórmula 111.321*cos(lat). La ciudad de Vilnius está ubicada a una latitud de 54.6833 grados (en formato decimal), por lo tanto, obtenemos: 111.321*cos(54.6833) = 64.3541.
Si necesita calcular el coeficiente para otro lugar, sustituya su latitud en la fórmula sin cambiar los demás valores.
También puede crear una tabla de cálculo que calcule automáticamente el valor del coseno para distintas latitudes.
En este caso, se utilizaría la siguiente fórmula:
(((lat-#lat)*const111.1365)^const2+((lon-#lon)*const111.321*[Sensor de cálculo del coseno de la latitud])^const2)^const0.5/((time-#time)/const3600)
Determinar la distancia empleando el teorema de Pitágoras
Al calcular la distancia empleando el teorema de Pitágoras, se realizan los siguientes pasos:
- Calcular la diferencia entre los valores de latitud del mensaje actual y el anterior en kilómetros y elevarla al cuadrado.
- Calcular la diferencia entre los valores de longitud del mensaje actual y el anterior en kilómetros y elevarla al cuadrado.
- Sumar estos dos valores.
- Tomar la raíz cuadrada de la suma para obtener la distancia en kilómetros.
Calcular la velocidad
Para calcular la velocidad utilizando el valor de distancia obtenido, se realizan los siguientes pasos:
- Convertir la diferencia de tiempo entre el mensaje actual y el anterior de segundos a horas. Para ello, se divide la cantidad de segundos por el coeficiente 3600.
- Dividir la distancia por el valor obtenido.
Añadir el sensor de ignición a la fórmula (opcionalmente)
Si hay un sensor de ignición configurado para la unidad, se puede agregar una condición de valor cero cuando el encendido está apagado a la fórmula. Esto permitirá no tomar en cuenta los cambios de coordenadas erróneos durante los estacionamientos. La expresión se puede especificar de la siguiente manera:
(((lat-#lat)*const111.1365)^const2+((lon-#lon)*const64.3541)^const2)^const0.5/((time-#time)/const3600)*[Nombre de sensor de ignición]
Resultado
La velocidad obtenida se expresa en kilómetros por hora. Este método muestra la velocidad promedio necesaria para viajar de un punto a otro durante el tiempo entre dos mensajes, no la velocidad instantánea como lo hacen los rastreadores.
Parámetro del sensor de horas de motor relativas
Para obtener datos de horas de motor reales, tiene que crear dos sensores:
- sensor de coeficiente de horas de motor (determina la intensidad de operación del equipo dependiendo de revoluciones del motor);
- sensor de horas de motor relativas.
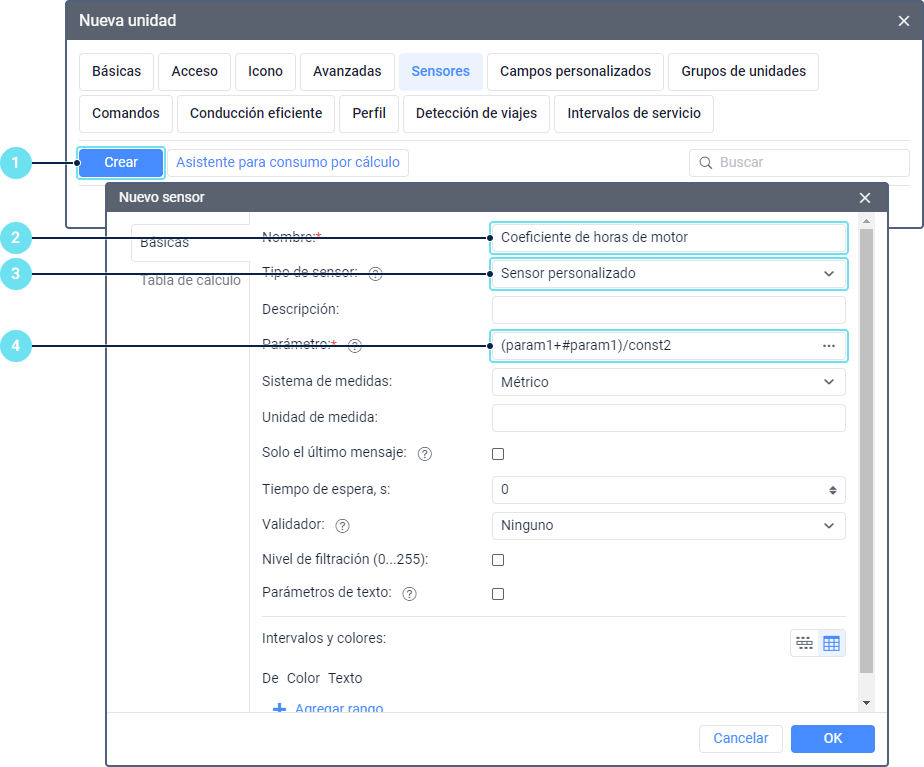
Para crear un sensor de coeficiente de horas de motor, siga los pasos a continuación.
-
Apriete Crear.
-
Escriba el nombre del sensor.
-
Escoja Sensor personalizado como tipo de sensor.
-
Escriba el parámetro del sensor como expresión (param1+#param1)/const2, donde param1 es el parámetro que contiene el valor de revoluciones del motor. El parámetro del sensor de coeficiente es el promedio de revoluciones de motor correspondientes al intervalo entre dos mensajes subsiguientes.
-
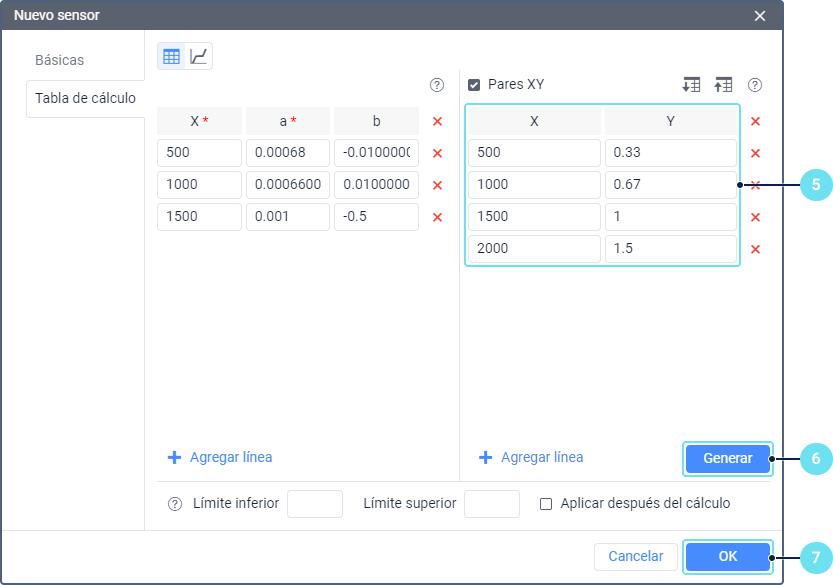
En la tabla de cálculo active la opción Pares XY y configúrelos de la siguiente forma:
X Y Nota 500
0.33
Un minuto de operación de 500 rpm corresponde a 20 segundos de horas de motor, es decir, el coeficiente es 0.33.
1000
0.67
Un minuto de operación de 1000 rpm corresponde a 40 segundos de horas de motor, es decir, el coeficiente es 0.67.
1500
1
Un minuto de operación de 1500 rpm corresponde a 60 segundos de horas de motor, es decir, el coeficiente es 1.
2000
1.5
Un minuto de operación de 2000 rpm corresponde a 90 segundos de horas de motor, es decir, el coeficiente es 1.5.
-
Apriete Generar.
-
Apriete ОК.
A continuación, cree un sensor de tipo Horas de motor relativas e indique el siguiente parámetro para el mismo:
(time-#time)*[Nombre del sensor de coeficiente]/const3600
El parámetro es la diferencia entre tiempos de mensajes subsiguientes multiplicada por el coeficiente de intensidad de operación y dividida por 3600. Tiene que dividir por 3600 para convertir segundos en minutos.
Puede emplear tales sensores en informes y contadores, pero no puede emplearlos en las notificaciones en línea porque estos requieren parámetros del mensaje anterior.
Comprobación de disponibilidad del valor
La disponibilidad de un valor se emplea para evitar pérdida de datos cuando se reemplaza el dispositivo. Para aplicar esta operación, indique en el campo Parámetro los parámetros empleados separándolos con la barra vertical (|). El sistema considera el primer valor válido de los parámetros indicados.
Ejemplo. Un dispositivo estuvo instalado en una unidad durante un mes. Este dispositivo envió datos en el param1. Durante el segundo mes se empleó otro dispositivo que envió los mismos datos en el parámetro param2. Para evitar pérdida de datos, al ejecutar informes de dos meses indique param1|param2 en las propiedades del sensor en el campo Parámetro. En este caso el sistema obtiene el valor del parámetro param1; y si no es válido, del parámetro param2.
Asimismo, se pueden utilizar valores de otros sensores en el formato [Nombre de sensor 1]|[Nombre de sensor 2] en lugar de un parámetro.
La comprobación de disponibilidad del valor no se aplica a los parámetros de entradas digitales y a los sensores creados en su base. Por ejemplo, no se realiza la comprobación si en el campo Parámetro se ha ingresado in1|in2.