Parámetros de sensores
El parámetro es una propiedad obligatoria del sensor. El funcionamiento de los sensores en el sistema depende principalmente de los datos enviados a través de estos parámetros.
Los nombres de los parámetros se definen en la configuración del dispositivo (por ejemplo: param199, param240, TEMP, pwr_int, gsm, can6, etc). La especificación técnica del dispositivo suele incluir qué parámetros se utilizan y qué datos se envían en cada uno. Además, es posible visualizar los parámetros disponibles en una columna específica dentro de la tabla de mensajes de datos recibidos de la unidad.
Al agregar o modificar un sensor, debe seleccionar un parámetro de la lista desplegable o introducir su nombre manualmente. Un mismo parámetro puede utilizarse para configurar múltiples sensores.
Parámetros virtuales
Los parámetros virtuales están incluidos en el sistema de forma predeterminada y son compatibles con casi cualquier tipo de dispositivo.
| Parámetro | Descripción |
|---|---|
time |
Tiempo UNIX del mensaje. |
regtime |
Fecha y hora en que el mensaje se registró en el servidor. |
sats |
Cantidad de satélites detectados. |
speed |
Velocidad actual. |
course |
Rumbo (dirección de movimiento). |
altitude |
Altitud sobre el nivel del mar. |
lon |
Longitud geográfica. |
lat |
Latitud geográfica. |
Algunos dispositivos poco comunes podrían ser no compatibles con ciertos parámetros, como la altitud o velocidad.
Parámetros de entradas y salidas
Este grupo comprende los parámetros de entradas analógicas, así como entradas y salidas digitales.
| Parámetro | Descripción |
|---|---|
adcN |
Entrada analógica, donde N es el número de entrada. Ejemplo: el parámetro adc8 recibe los valores de la octava entrada analógica. El sistema no limita la cantidad de entradas analógicas. |
inN |
Entrada digital, dondeN es el número de entrada. El valor de N debe estar entre 1 y 32; de lo contrario, el parámetro no funcionará. |
in |
Representa la suma de los valores de todas las entradas digitales. |
outN |
Salida digital, donde N es el número de salida. Al igual que con las entradas, el valor N debe estar entre 1 y 32; de lo contrario, el parámetro no funcionará. |
out |
Representa la suma de los valores de todas las salidas digitales. |
Los datos de entradas y salidas digitales suelen recibirse con el formato I/O = 0/0, donde I representa la entrada (input) y O la salida (output).
- Si
I/O = 0/0, todos los bits (entradas y salidas) están inactivos. - Si el valor de
IoOes distinto de cero, significa que alguna entrada o salida está activa. Para identificarla, es necesario convertir el número hexadecimal a binario y determinar el número del bit, como se muestra en el siguiente ejemplo.
Ejemplo de cálculo
Supongamos que recibimos un mensaje con el parámetro I/O = 10/0 desde una actividad con la ignición encendida. Para determinar el número del bit (en este caso, de la entrada activa):
- Tome el valor hexadecimal recibido, es decir, 10.
- Conviértalo a binario usando una calculadora (HEX a BIN). El resultado es 10 000.
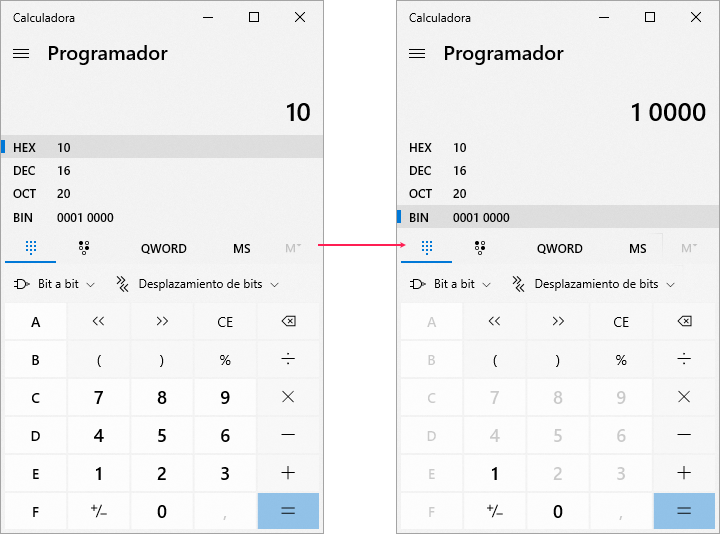
- Cuente la posición del número 1 de derecha a izquierda.
- En este caso, el
1ocupa la quinta posición desde la derecha, lo que indica que el sensor de ignición está conectado al quinto puerto. Por lo tanto, el parámetro correcto para el sensor seríain5.
Si la numeración de puertos en su dispositivo comienza desde cero (0) y no desde uno (1 ), el valor
Nen los parámetrosinNyoutNserá siempre el número del puerto real más uno.
Parámetros constantes
Los parámetros constantes tienen el formato constN, donde N es cualquier número. Se utilizan para crear sensores virtuales que emiten un valor fijo de forma permanente.
Son útiles en las siguientes situaciones:
- En gráficas para visualizar un límite o umbral crítico.
- En parámetros definidos mediante expresiones.
- Como sensores de validación para otros sensores virtuales.
Parámetros de texto
Aunque la mayoría de los datos son numéricos, algunos dispositivos envían texto (por ejemplo: estados como «libre/ocupado», «encendido/apagado» o descripciones de eventos).
Estos valores solo son compatibles con sensores de tipo Sensor personalizado. Para que se muestren correctamente, active la opción Parámetros de texto en las propiedades del sensor personalizado.
Dónde se visualizan los valores de texto
Una vez configurados, estos datos pueden verse en los siguientes lugares:
- En la información adicional sobre la unidad.
- En la pestaña Mensajes.
- En la herramienta Reproductor de recorridos.
- En la herramienta Análisis de recorridos.
- En la columna Valor formateado de la tabla Seguimiento del sensor.
Los valores de texto se muestran tal como los envía el dispositivo, por lo que no es necesario configurar una tabla de cálculo para ellos.
Los valores de texto se consideran no válidos y se muestran como una raya en los informes en las siguientes columnas:
- Valor mínimo del sensor personalizado
- Valor máximo del sensor personalizado
- Valor inicial del sensor personalizado
- Valor final del sensor personalizado
Estas columnas se pueden encontrar en las siguientes tablas de informes:
- Conducción eficiente
- Descargas de combustible
- Geocercas
- Horas de motor
- Llenados de combustible y recargas de batería
- Resumen
- Sensores digitales
- Viajes