Paramètres sous forme d’une expression
Le paramètre du capteur peut être une expression composée. Grâce à ces paramètres, vous pouvez créer une grande variété de capteurs qui répondent à tous les besoins et objectifs. Dans l’expression, vous pouvez utiliser :
- paramètres du dernier message (adc1, in1 etc.) ;
- paramètres du message précédent (ils doivent être précédés d’un signe #, par exemple, #adc1) ;
- contrôle du paramètre au niveau de bit (param199:3 etc.) ;
- noms des capteurs (ils doivent être spécifiés entre crochets, par exemple [Niveau de carburant]) ;
- paramètres constants (const10, const-4.54 etc.) ;
- symboles des opérations mathématiques indiquées ci-dessous.
| Symbole | Opération |
|---|---|
+ | addition |
− | soustraction |
∗ | multiplication |
/ | division |
^ | élévation à une puissance (par exemple, ^const2 — élever au carré, ^const0.5 — définir la racine carrée). |
( ) | parenthèses de priorité (par exemple, dans l’expression const1.5*(param1−#param1) les parenthèses signifient que la soustraction doit précéder la multiplication) |
| | |
: | conversion d’un paramètre |
Les paramètres du message précédent ne sont pas disponibles dans les cas suivants :
- pour le capteur Mode Privé et son validateur,
- pour le capteur Affectation du conducteur et son validateur,
- pour les capteurs dans les notifications,
- dans les bulles d’aide des graphiques,
- lors de la retransmission des capteurs.
Si l’un des paramètres inclus dans l’expression est invalide, sa valeur entière est aussi invalide.
Les valeurs des capteurs sont calculées dans l’ordre suivant :
- calcul de l’expression dans le champ Paramètre,
- conversion de la valeur selon le tableau de calcul (si configuré),
- validation (si configurée).
Paramètre du capteur qui détermine la vitesse par coordonnées
Cette section décrit comment préparer une formule pour le paramètre du capteur qui permet de déterminer la vitesse d’une unité à partir de ses coordonnées. Un capteur doté de ce paramètre peut être utile si le traceur n’envoie pas la valeur de la vitesse, mais seulement les coordonnées.
La formule prête est spécifiée dans le champ Paramètre du capteur à créer. Le type de capteur doit être Capteur personnalisé.
Ce capteur ne peut être utilisé que dans les rapports (pas dans les notifications en ligne), car il nécessite les paramètres du message précédent.
Vous trouverez ci-dessous un exemple de formule toute faite pour Vilnius, ainsi que les étapes d’application de la formule. En principe, la vitesse est calculée en divisant la distance par le temps.
(((lat-#lat)*const111.1365)^const2+((lon-#lon)*const64.3541)^const2)^const0.5/((time-#time)/const3600)
Les étapes du calcul de la vitesse à l’aide de cette formule peuvent être divisées en 3 étapes :
- Calcul des coefficients pour convertir les valeurs de latitude et de longitude en kilomètres, en tenant compte de l’emplacement de l’unité.
- Calcul de la distance à l’aide du théorème de Pythagore.
- Calcul final de la vitesse à l’aide des données obtenues à l’étape 2.
Calcul des coefficients pour les valeurs lat et lon
Les valeurs de latitude (lat) et de longitude (lon) doivent être converties de degrés en kilomètres. Pour ce faire, vous devez calculer les coefficients. Le coefficient pour la valeur de la longitude dépend de la localisation.
- Latitude (lat). La distance parcourue par 1 degré de latitude diffère légèrement du pôle nord au pôle sud : de 110,579 kilomètres à l’équateur à 111,694 kilomètres aux pôles. Pour simplifier les calculs, on peut utiliser la valeur moyenne : 110,579+111,694)/2=111,1365.
- Longitude (lon). La distance parcourue par 1 degré de longitude varie considérablement du pôle nord au pôle sud : de 0 kilomètre aux pôles à 111,321 kilomètres à l’équateur. Cette distance est calculée par la formule 111,321*cos(lat). Vilnius est situé à la latitude 54,6833 degrés (en format décimal), ce qui donne : 111.321*cos(54.6833)=64.3541.
Si vous souhaitez calculer le coefficient pour un autre lieu, remplacez sa latitude dans la formule sans modifier les autres valeurs.
Vous pouvez également créer un tableau de calcul qui calcule automatiquement la valeur du cosinus pour différentes latitudes. Dans ce cas, la formule suivante sera utilisée :
(((lat-#lat)*const111.1365)^const2+((lon-#lon)*const111.321*[Capteur de calcul du cosinus de la latitude])^const2)^const0.5/((time-#time)/const3600)
Calcul de la distance à l’aide du théorème de Pythagore
Le calcul de la distance par le théorème de Pythagore s’effectue de la manière suivante :
- Calculer la différence entre les valeurs de latitude du message actuel et du message précédent, en kilomètres, et l’élever au carré.
- Calculer la différence entre les valeurs de latitude du message actuel et du message précédent en kilomètres, au carré.
- Additionnez les deux valeurs.
- Prenez la racine carrée de la somme pour obtenir la distance en kilomètres.
Calcul final de la vitesse
Les étapes suivantes permettent de calculer la vitesse à l’aide de la valeur de la distance obtenue :
- Convertir la différence de temps entre le message actuel et le message précédent de secondes en heures. Pour ce faire, divisez le nombre de secondes par un facteur de 3600.
- Diviser la distance par la valeur obtenue.
Ajout d’un capteur d’allumage à la formule (facultatif)
Si un capteur d’allumage est configuré pour l’unité, vous pouvez ajouter à la formule la condition de valeur zéro lorsque l’allumage est coupé. Cela évitera de prendre en compte le changement erroné de coordonnées lors du stationnement. Pour ce faire, l’expression peut être spécifiée sous la forme suivante :
(((lat-#lat)*const111.1365)^const2+((lon-#lon)*const64.3541)^const2)^const0.5/((time-#time)/const3600)*[Nom du capteur d’allumage]
Résultat
La vitesse obtenue est exprimée en kilomètres par heure. Cette méthode indique la vitesse moyenne nécessaire pour aller d’un point à un autre entre deux messages, et non la vitesse instantanée comme le font les traceurs.
Paramètre du capteur d’heures moteur relatives
Pour obtenir les données sur les heures moteur réelles, vous devez créer deux capteurs suivants :
- capteur du coefficient d’heures moteur (détermine l’intensité de fonctionnement de l’équipement en fonction du régime moteur) ;
- capteur d’heures moteur relatives.
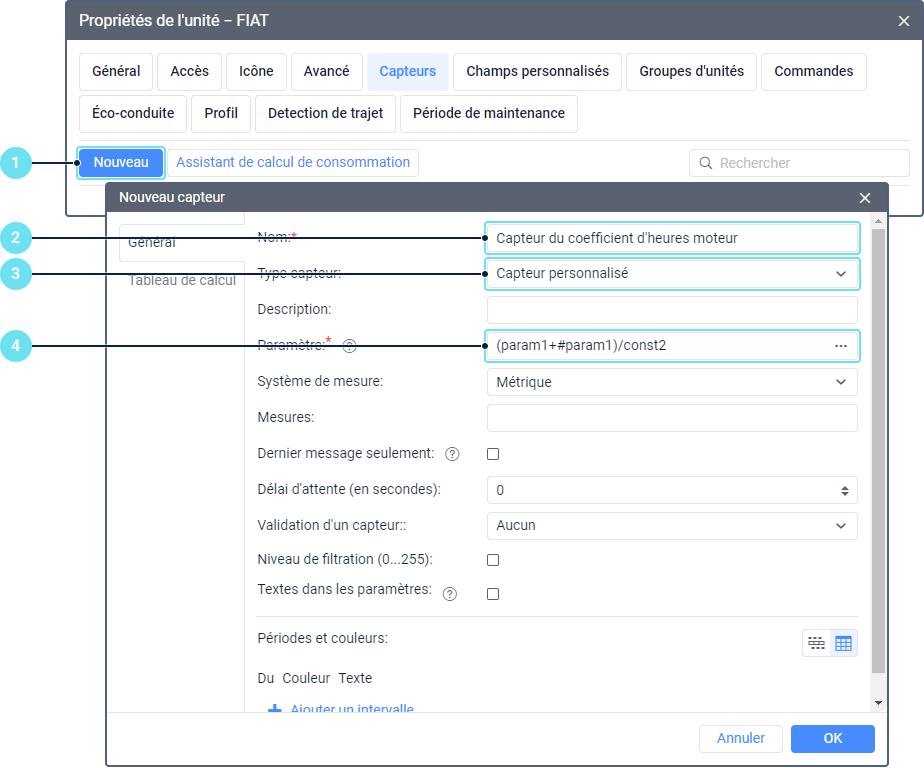
Pour créer un capteur du coefficient d’heures moteur, procédez comme suit :
-
Appuyez sur Nouveau.
-
Spécifiez le nom du capteur.
-
Sélectionnez Capteur personnalisé comme type.
-
Comme paramètre du capteur, spécifiez l’expression (param1+#param1)/const2, où param1 représente le paramètre qui envoie la valeur des tours du moteur. Le paramètre du capteur de coefficient est la moyenne arithmétique des tours moteur dans l’intervalle entre deux messages voisins.
-
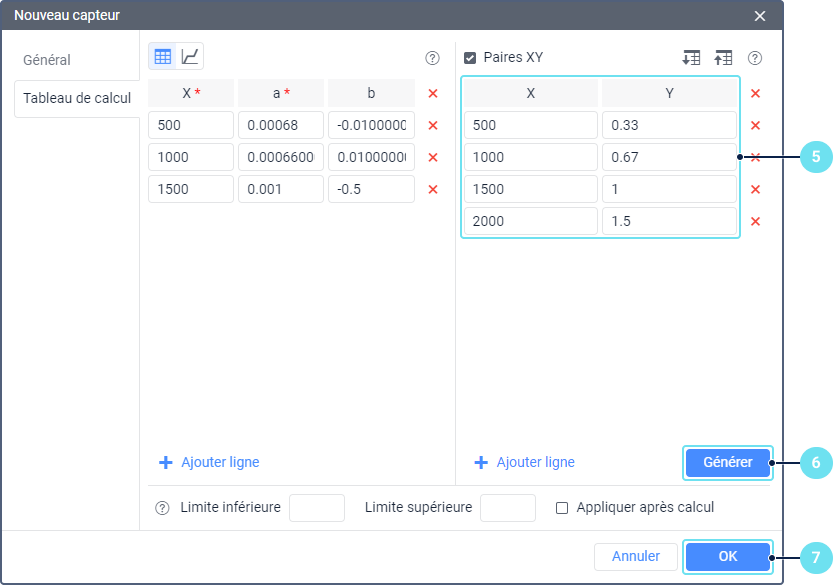
Dans le tableau de calcul, activez l’option Paires XY et configurez-les comme suit :
X Y Commentaire 500
0.33
Une minute de fonctionnement à 500 tr/min correspond à 20 secondes d’heures moteur, donc le coefficient est égal à 0,33
1000
0.67
Une minute de fonctionnement à 1000 tr/min correspond à 40 secondes d’heures moteur, donc le coefficient est égal à 0.67.
1500
1
Une minute de fonctionnement à 1500 tr/min correspond à 60 secondes d’heures moteur, donc le coefficient est égal à 1.
2000
1.5
Une minute de fonctionnement à 2000 tr/min correspond à 90 secondes d’heures moteur, donc le coefficient est égal à 1,5.
-
Appuyez sur le bouton Générer.
-
Cliquez sur ОК.
Ensuite, créez un capteur de type Heures moteur relatives et spécifiez le paramètre suivant :
(time-#time)*[Coefficient sensor name]/const3600
Ce paramètre est la différence de temps entre deux messages voisins qui est multipliée par le coefficient d’intensité de fonctionnement et divisée par 3600. Il est nécessaire de diviser par 3600 pour convertir les secondes en heures.
Vous pouvez utiliser ces capteurs dans les rapports et les compteurs, mais pas dans les notifications en ligne, car ils nécessitent des paramètres du message précédent.
Vérification de disponibilité de la valeur
La vérification de disponibilité de la valeur est utilisée pour éviter la perte de données en cas du remplacement de l’équipement. Pour appliquer cette opération, indiquez les paramètres requis dans le champ Paramètre en les séparant par une barre verticale (|). Le système prend en compte la première valeur valide parmi les paramètres spécifiés.
Exemple. L’équipement installé sur l’unité au cours du premier mois envoie des données dans le paramètre param1 et que l’équipement utilisé depuis le deuxième mois envoie les mêmes données dans le paramètre param2. Pour éviter la perte de données, en cas de l’exécution d’un rapport de deux mois, vous devez spécifier param1|param2 dans le champ Paramètre des propriétés du capteur. Dans ce cas, le système prend la valeur du paramètre param1, mais si elle est invalide, il la prend de param2.
Les valeurs des autres capteurs peuvent également être utilisées dans le format [Nom du capteur1]|[Nom du capteur2] au lieu du paramètre.
La vérification de disponibilité de la valeur ne fonctionne pas avec les paramètres des entrées numériques, ainsi qu’avec les capteurs créés sur leur base. Par exemple, la vérification ne fonctionne pas si le champ Paramètre spécifie in1|in2.