Détecteur de trajets
Les paramètres du détecteur de trajets sont utilisés pour définir des intervalles de déplacement, trajets, stationnements et arrêts.
Pour travailler avec l’onglet, vous devez savoir les concepts suivants :
Concept | Definition |
|---|---|
Déplacement | Le déplacement est considéré comme les intervalles dans lesquels la vitesse était supérieure ou égale à la valeur du champ Vitesse de déplacement minimale. Dans ce cas, chaque message de l’unité est considéré séparément. Cependant, si la méthode de détection de déplacement par coordonnées GPS est sélectionnée, le déplacement est compris comme la non-concordance des coordonnées entre deux messages consécutifs. |
Trajet | Un trajet est un intervalle pendant lequel les conditions de tous les paramètres du détecteur de trajets sont remplies. Ces conditions dépendent de la méthode de détection de déplacement sélectionnée et sont décrites dans le tableau ci-dessous. Lors de la détermination des trajets, chaque message est considéré séparément, aussi bien que leur séquence. Les trajets peuvent inclure des arrêts. |
Arrêt | Un arrêt est un intervalle auquel la vitesse était inférieure à la valeur du champ Vitesse de déplacement minimale, mais dont la durée était inférieure à la valeur du champ Temps de stationnement minimal. Lorsqu’un arrêt est défini, le trajet n’est pas interrompu. |
Stationnement | Un stationnement est un intervalle auquel la vitesse était inférieure à la valeur du champ Vitesse de déplacement minimale, mais dont la durée était supérieure ou égale à la valeur du champ Temps de stationnement minimal. Lorsqu’un stationnement est défini, le trajet est terminé. |
Dans le détecteur de trajets les messages avec des données issues de LBS et bornes Wi-Fi ne sont pas pris en compte.
Méthodes de détection de déplacement
La méthode de détection de déplacement sélectionnée affecte la manière dont les trajets sont détectés. Les méthodes suivantes sont disponibles :
| Méthode | Description |
|---|---|
| Vitesse | Cette méthode peut être utilisée pour tous les types d’appareils qui envoient des valeurs de vitesse déterminées à l’aide de GPS ou d'autre source. Si cette méthode est sélectionnée, le trajet est détecté si deux conditions sont remplies :
|
Coordonnées GPS | Cette méthode peut être utilisée pour les appareils qui n’envoient pas de valeurs de vitesse, mais dont les données de localisation, déterminées à l’aide de GPS, sont reçues. Si cette méthode est sélectionnée, le trajet est détecté si deux conditions sont remplies :
|
| Capteur d’allumage | Cette méthode n’est disponible que si l’unité est équipée d’un capteur du même type. Le déplacement est détecté si ces trois conditions sont remplies :
Le trajet se termine si le capteur d’allumage est désactivé ou si la vitesse est inférieure au minimum. Le trajet est aussi terminé si le délai d’attente, spécifié pour le capteur, est dépassé. Si la valeur de la vitesse est incorrecte ou indisponible, l'état de déplacement est uniquement déterminé par le capteur d'allumage. |
| Capteur kilométrique | Cette méthode n’est disponible que si l’unité est équipée d’un capteur du même type qui rend la valeur de kilométrage absolu. Le déplacement est détecté si trois conditions sont remplies :
Si la valeur de vitesse est invalide ou inaccessible, l’état du déplacement est déterminé en fonction de l’augmentation des valeurs du capteur kilométrique. |
| Odomètre relatif | Cette méthode n’est disponible que si l’unité est équipée d’un capteur du même type qui détermine la distance parcourue par l’unité depuis la réception du dernier message. Le déplacement est détecté si trois conditions sont remplies :
Si la valeur de vitesse est invalide ou inaccessible, l’état du déplacement est déterminé en fonction de la valeur non nulle de l’odomètre relatif. |
Si vous avez sélectionné une méthode Capteur d’allumage, Capteur de kilométrage ou Odomètre relatif et que plusieurs capteurs d’un type approprié sont configurés sur l’unité, le capteur dont l’ID est le plus petit dans le système est utilisé pour déterminer les trajets.
Paramètres de déplacement
Après avoir sélectionné la méthode de détection de déplacement, spécifiez les valeurs des paramètres qui doivent être pris en compte dans les intervalles de trajets, arrêts et stationnements.
| Paramètre | Description |
|---|---|
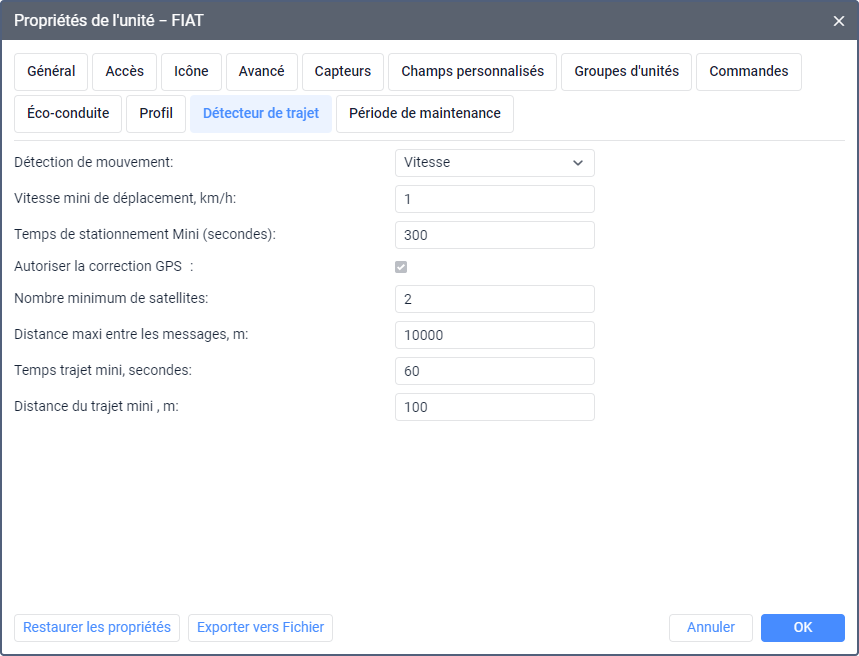
Vitesse minimale de déplacement | La valeur de vitesse minimale à laquelle l’unité doit être considérée comme se déplaçant. Elle est précisée pour que les coordonnées GPS aberrantes et les erreurs d’équipement lors du stationnement de l’unité ne soient pas considérées comme des déplacements. Si 0 est indiqué pour ce paramètre, les arrêts de l'unité ne sont pas détectés, seuls les trajets et le stationnement le sont. |
| Temps minimal de stationnement | Dans ce champ, vous pouvez spécifier combien de temps l’unité doit rester sans mouvement pour que cela soit considérée comme un stationnement. Si l’unité ne bouge pas pendant moins que le temps spécifié, cela est considéré comme un arrêt dans le trajet. Si le temps entre deux messages consécutifs dans un trajet est supérieur ou égal à la valeur spécifiée, alors le trajet se termine. Si l’option Activer la correction GPS est activée, la valeur minimale de ce paramètre doit être de 10 secondes. |
Activer la correction GPS
L’option Activer la correction GPS est toujours activée pour les méthodes de détection de déplacement Vitesse et Coordonnées GPS. Pour les autres méthodes de détection de déplacement, cette option peut être désactivée. Si l’option est activée, vous devez spécifier les valeurs des paramètres suivants :
| Paramètre | Description |
|---|---|
| Nombre minimum de satellites | Spécifiez le nombre minimum de satellites disponibles pour détecter un trajet. Le nombre recommandé est d’au moins quatre satellites. |
| Distance maximale entre les messages | Spécifiez en mètres la distance maximale entre les messages que l’unité doit parcourir pour que l’intervalle de déplacement se termine et un nouveau commence. |
| Temps minimum de trajet | Spécifiez en secondes le temps minimum de déplacement qui doit être considéré comme un trajet. Cela est nécessaire pour éviter les fausses détections de trajet, par exemple lors de courts mouvements dans un stationnement ou dans un embouteillage. L’option s’applique à une séquence de plusieurs messages. |
| Distance minimale de trajet | Spécifiez en mètres la distance minimum que l’unité doit parcourir pour que son déplacement soit considéré comme un trajet. Cela est nécessaire pour éliminer l’erreur possible de l’équipement avec la détermination de l’emplacement de l’unité. L’option s’applique à une séquence de plusieurs messages. |