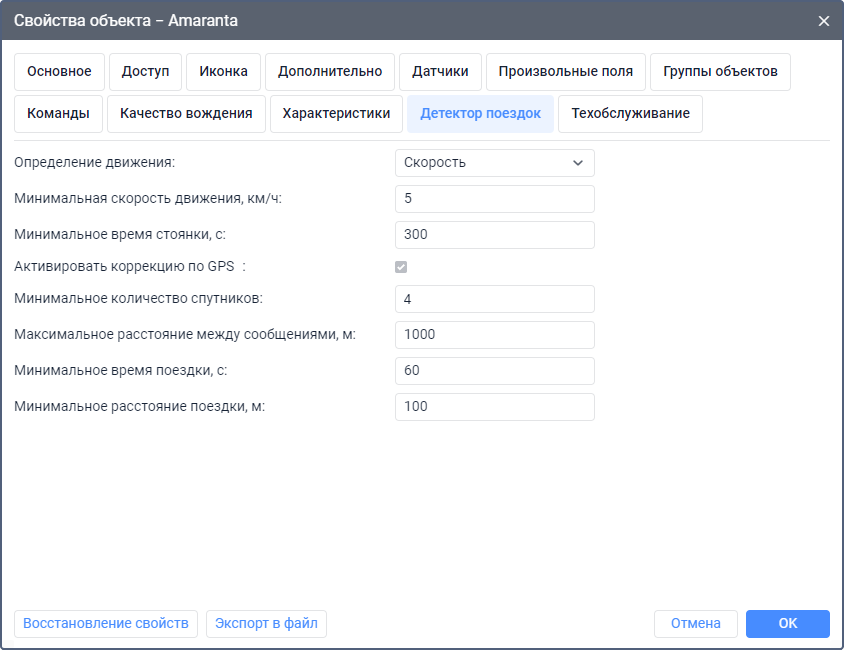
Детектор поездок
Параметры детектора поездок используются для определения интервалов движения, поездок, остановок и стоянок.
Для работы со вкладкой ознакомьтесь со следующими понятиями:
| Понятие | Описание |
|---|---|
| Движение | Движением считаются те интервалы, в которых скорость была выше или равна значению из поля Минимальная скорость движения. При этом каждое сообщение от объекта рассматривается в отдельности. Однако если выбран метод определения движения GPS-координаты, то под движением понимается несовпадение координат между двумя сообщениями подряд. |
| Поездка | Поездкой считается интервал, на протяжении которого соблюдаются условия всех параметров из детектора поездок. Эти условия зависят от выбранного метода определения движения и описаны в таблице ниже. При определении поездок рассматривается не только каждое сообщение в отдельности, но и их последовательность. В интервалы поездок могут входить остановки. |
| Остановка | Остановкой считается интервал, на котором скорость была ниже значения из поля Минимальная скорость движения, но длительность которого была меньше, чем значение из поля Минимальное время стоянки. При определении остановки поездка не прерывается. Если в интервале только одно сообщение со значением скорости ниже минимальной, то время этого сообщения считается одновременно началом и концом остановки. Вместо значения длительности во всплывающей подсказке к маркеру такой остановки показывается Н/Д, а в отчетах — 0:00:00. Пример. В поле Минимальная скорость движения указано значение 1 км/ч. В 09:00:00 от объекта пришло сообщение со значением скорости 2 км/ч, затем в 09:01:00 — со значением 0 км/ч, а после этого в 09:02:00 было получено сообщение со значением 1 км/ч. В этом случае 09:01:00 считается временем начала и конца остановки, а ее длительность неизвестна. |
| Стоянка | Стоянкой считается интервал, на котором скорость была ниже значения из поля Минимальная скорость движения, но длительность которого была больше или равна значению из поля Минимальное время стоянки. При определении стоянки поездка завершается. |
В детекторе поездок не учитываются сообщения с данными, определенными по LBS и точкам Wi-Fi.
Методы определения движения
Выбранный метод определения движения влияет на то, как детектируются поездки. Доступны следующие методы:
| Метод | Описание |
|---|---|
| Скорость | Этот метод можно использовать для всех типов устройств, которые присылают значения скорости, определенные по GPS или другому источнику. Если выбран этот метод, то поездка определяется при выполнении двух условий:
|
| GPS-координаты | Этот метод можно использовать для устройств, которые не присылают значения скорости, но от которых приходят данные о местоположении, полученные с помощью GPS. Если выбран этот метод, то поездка определяется при выполнении двух условий:
|
| Датчик зажигания | Этот метод доступен только при наличии датчика одноименного типа. Поездка определяется при выполнении трех условий:
Поездка завершается, если отключен датчик зажигания или значение скорости меньше минимального. Также поездка заканчивается, если превышен таймаут, указанный для датчика. Если значение скорости является некорректным или недоступно, состояние движения определяется только по датчику зажигания. |
| Датчик пробега | Этот метод доступен только при наличии датчика одноименного типа, который передает значение абсолютного пробега. Поездка определяется при выполнении трех условий:
Если значение скорости является некорректным или недоступно, состояние движения определяется согласно увеличению значений датчика пробега. |
| Относительный одометр | Этот метод доступен только при наличии датчика одноименного типа, который определяет расстояние, пройденное объектом с момента получения последнего сообщения. Поездка определяется при выполнении трех условий:
Если значение скорости является некорректным или недоступно, состояние движения определяется согласно ненулевому значению относительного одометра. |
Если выбран метод Датчик зажигания, Датчик пробега или Относительный одометр, а у объекта настроено несколько датчиков подходящего типа, то для определения поездок используется датчик с наименьшим ID в системе.
Параметры движения
После того как вы выбрали метод определения движения, укажите значения параметров, которые должны учитываться в интервалах поездок, остановок и стоянок.
| Параметр | Описание |
|---|---|
| Минимальная скорость движения | Минимальное значение скорости, при котором должно считаться, что объект движется. Оно указывается, чтобы выбросы GPS-координат и погрешность оборудования во время стоянки объекта не рассматривались как движение. Если для этого параметра указано значение 0, то остановки объекта не детектируются, определяются только поездки и стоянки. |
| Минимальное время стоянки | В этом поле можно указать, как долго объект должен быть без движения, чтобы это считалось стоянкой. Если объект находится без движения меньше указанного времени, то это считается остановкой в рамках поездки.Если в поездке время между двумя сообщениями подряд больше или равно указанному значению, то поездка завершается. Если опция Активировать коррекцию по GPS включена, минимальное значение этого параметра должно быть 10 секунд. |
Активировать коррекцию по GPS
Опция Активировать коррекцию по GPS всегда включена для методов определения движения Скорость и GPS-координаты. Для других методов определения движения эту опцию можно выключить. Если опция включена, необходимо указать значения следующих параметров:
| Параметр | Описание |
|---|---|
| Минимальное количество доступных спутников | Укажите минимальное количество доступных спутников для определения поездки. Рекомендуемое количество — не менее четырех. |
| Максимальное расстояние между сообщениями | Укажите в метрах максимальное расстояние между сообщениями, при котором должен завершиться текущий интервал движения и начаться новый. |
| Минимальное время поездки | Укажите в секундах минимальное время движения, которое должно считаться поездкой. Это необходимо для того, чтобы исключить ложные определения поездок, например, при коротких перемещениях на парковке или в пробке. Параметр применяется к последовательности из нескольких сообщений. |
| Минимальное расстояние поездки | Укажите в метрах минимальное расстояние, которое должен пройти объект, чтобы его движение считалось поездкой. Это необходимо для того, чтобы исключить возможную погрешность оборудования при определении местоположения объекта. Параметр применяется к последовательности из нескольких сообщений. |