Eco driving
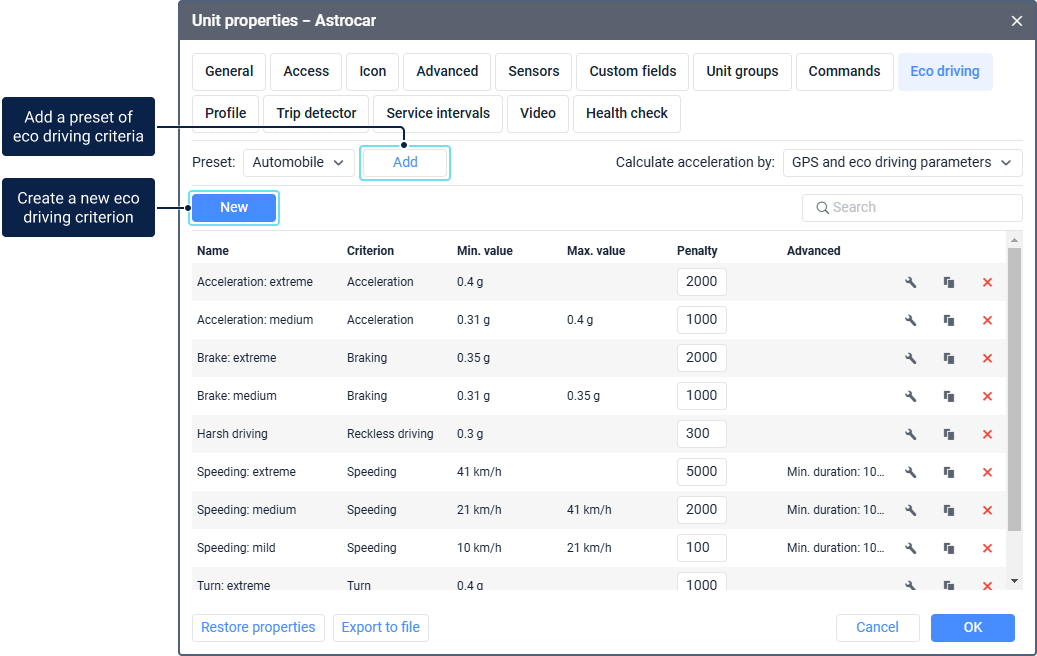
On this tab, you can select the method which should be used to calculate acceleration and add criteria which allow you to assess the quality of driving and detect violations. This is required in order to improve the safety of driving, maintain the quality of transported goods, and reduce fuel costs. For further information, see Eco Driving Control.
The tab contains a list of all the added criteria and their parameters.
After adding the criteria and specifying all the required parameters, you can execute a report with detailed information about all the violations for the selected interval.
Calculating acceleration
Acceleration is the difference in the unit speed divided by the difference in time. The movement direction of the unit allows determining the acceleration type: speeding, turn, reckless drivings, etc.
When calculating acceleration, the following data is used:
- unit location;
- initial and final speed values;
- travel time between two points;
- unit movement direction;
- values of special parameters sent by the device.
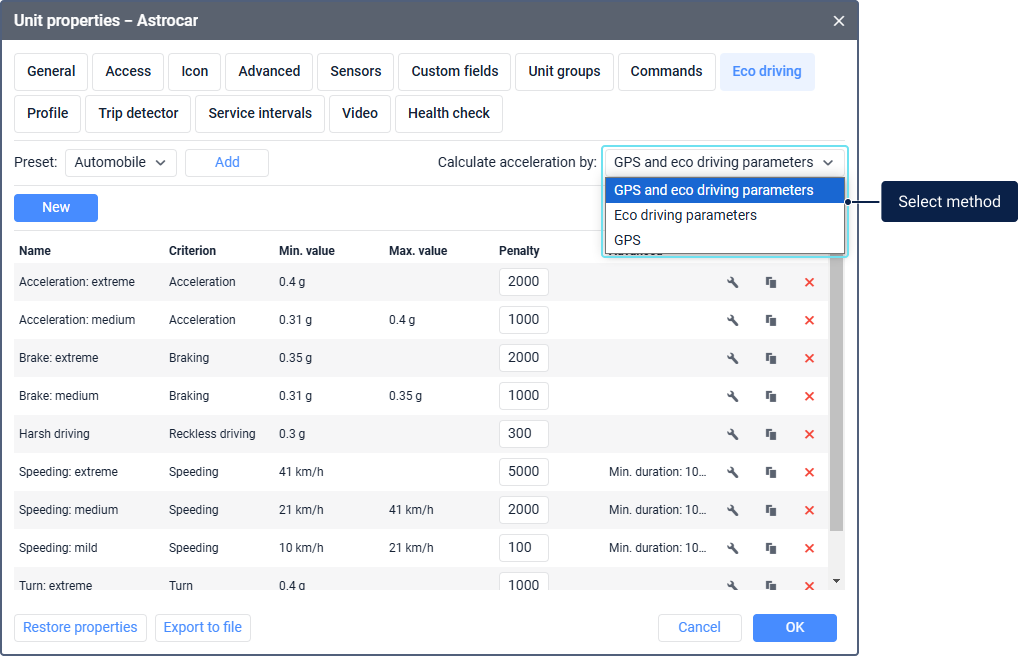
Three methods for calculating acceleration are available.
| Method | Description |
|---|---|
| GPS and eco driving parameters | The acceleration is calculated both according to the data on the unit location, speed, movement direction and time and on the basis of special parameters sent by devices: wln_accel_max, wln_brk_max, and wln_crn_max. Then the system selects a higher value. |
| Eco driving parameters | The acceleration is calculated by the device and is displayed in the device messages as special parameters which contain the maximum speed values for the period between two messages: wln_accel_max, wln_brk_max, and wln_crn_max. These parameters can be received only from some devices. The calculation method based on the eco driving parameters is more accurate because the calculation doesn’t depend on the frequency of sending data.The messages in which the unit location is determined by LBS or Wi-Fi points are not taken into account when calculating acceleration. If the data that can be used to calculate acceleration is received in parameters other than wln_accel_max, wln_brk_max, and wln_crn_max, you should create sensors and custom criteria based on them. See a configuration example for Teltonika devices here. |
| GPS | The acceleration is calculated according to the data on the unit location, speed, movement direction and time. For a more correct calculation, set the minimum possible interval of sending messages on your device, but not less than 2 seconds. It is advisable to use this method only if you can’t use the previous one. |
By default, the acceleration is calculated according to the GPS and eco driving parameters method.
You can select the required calculation method depending on the type of equipment used.
The selected method is applied to all the configured criteria, except for the criteria of the Speeding and Custom types.
Adding criteria
You can add eco driving criteria by applying a preset or create them manually.
Adding criteria using a preset
Depending on the vehicle type, you can add a list of criteria with the already configured parameters. To do this, select the required preset from the three available options (Automobile, Truck, Bus) and click Add.
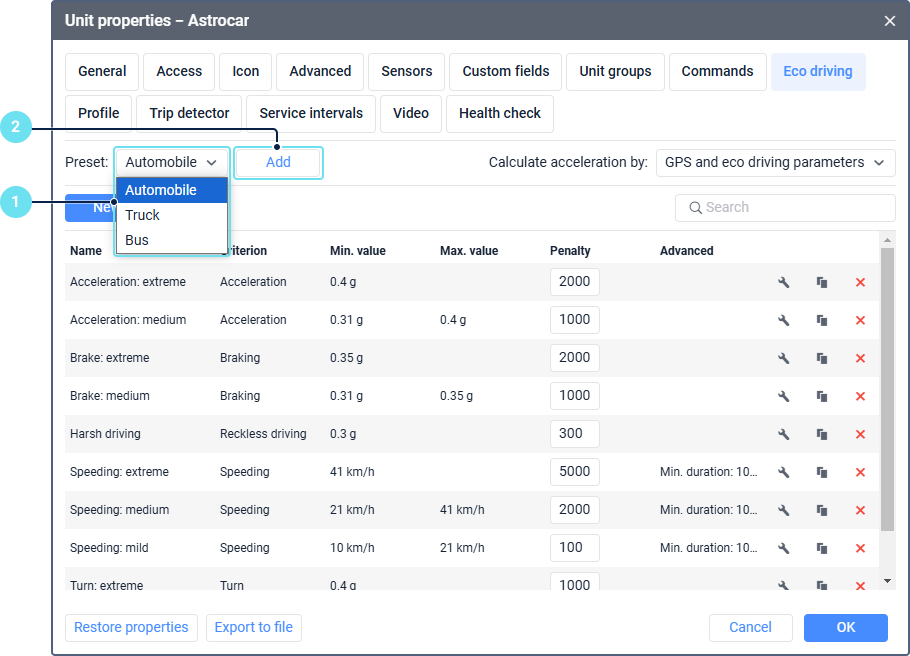
The criteria of the selected preset are automatically added to the list.
Creating criteria manually
To create a new criterion manually, follow the steps below.
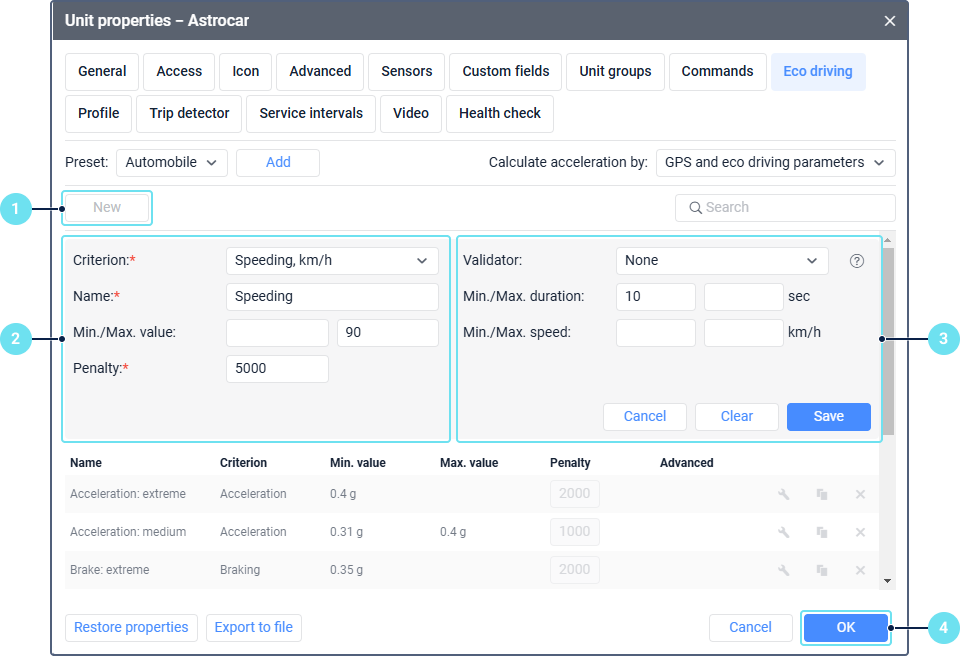
- Click New.
- Specify the basic parameters of the criterion.
- If necessary, specify the advanced parameters.
- Click Save to save the criterion. To discard the changes, click Clear. To cancel adding the criterion, click Cancel.
Basic parameters
To configure the criterion, specify its basic parameters. The required fields are marked with an asterisk (*).
| Parameter | Description |
|---|---|
| Criterion* | Select one of the available criteria which should be used when assessing the quality of driving:
|
| Name* | Specify the name of the criterion. |
| Sensor* | The parameter is available only when the Custom criterion is selected. In the drop-down list, select one of the created sensors the values of which should be used when detecting violations. If a digital sensor is selected, the Violations from device option is available. If you activate this option, the violation duration coincides with the interval of the sensor operation. |
| Min./Max. value | Specify the minimum and maximum values of the selected criterion which should be considered a violation. If the received value of the criterion falls in the specified interval, a violation is detected. The interval doesn’t include the value that you specified as the maximum one. For the Speeding criterion, the values are specified in km/h; for the Acceleration, Braking, Turn, Reckless driving criteria, in g. For the Idling criterion, in seconds (s). For the Custom criterion, the values of the selected sensor are specified. |
| Penalty* | Specify the number of penalty points which should be added for each violation according to the selected criterion. |
The Eco driving table includes not only the trip data, but the data received during the whole report interval. It contains all the violations for the period which you indicate when running a report. In other report tables all criteria are taken into account only during trips.
The intervals of all criteria, except for the Custom one, are combined. If one violation is followed by another one based on the same criterion within 10 seconds, these violations are combined.
Advanced parameters
If necessary, specify the advanced parameters of the criterion.
| Parameter | Description |
|---|---|
| Validator | In the drop-down list, select one of the created sensors you want to use as a validator for confirming or rejecting the received values of the selected criterion. If at least one positive value of the validator is received, a violation is detected. After selecting the validator, the Multiplier option is available. If you activate it, the number of penalty points for the violation is multiplied by the value of the selected sensor. For example, if you want to monitor speeding when transporting goods, you can create a weight sensor, select it as a validator, and activate the Multiplier option. If the vehicle is not loaded with goods, the sensor value is zero; if loaded, the value is greater than zero. In this case, if the speed is exceeded when transporting goods, the number of specified penalty points is multiplied by the validator value. |
| Min./Max. duration | Use these fields to specify the duration range for the criterion. A violation is recorded if the duration of the event exceeds the specified minimum value. If the duration exceeds the maximum value, the system splits the total duration into segments equal to that maximum time. A separate violation is then recorded for each segment, including the final remaining segment (even if it is shorter than the maximum duration). Example. A criterion is set for exceeding the speed limit by 15 km/h with a maximum time of 10 seconds. If the unit maintains this excess speed for a continuous interval of 66 seconds, the system will record 7 violations. This is calculated by dividing the 66-second interval into six full 10-second segments ( 6 * 10 = 60) plus one final 6-second segment. Since the last segment is counted regardless of its length, the total count is 6 + 1 = 7 violations. |
| Min./Max. speed | Specify the speed range at which violations should be detected. The system determines the maximum speed at the violation interval and compares it with the values specified in these fields. If the speed falls in the specified range, a violation is detected. For example, you can specify only the minimum speed here. This allows not taking into account violations (speedings, accelerations, brakings, etc.) when moving at a speed the value of which is less than the specified one. |
Actions with criteria
To perform actions with criteria, use the icons at the end of each line.
| Icon | Description |
|---|---|
 |
Open the criterion properties. |
 |
Create a new criterion with the same properties. A click on the icon opens the window for creating a new criterion where you can make changes and save them. |
 |
Delete the criterion. |
To find a specific criterion among the added ones, use the dynamic search above the list. It allows searching for criteria by name.
Reports
If all the parameters of the tab are specified correctly, you can execute a report with the Eco driving table, or add the Penalties and Rank columns to the following tables:
- Geofences;
- Counter sensors;
- Engine hours;
- Unfinished Trips;
- Trips;
- Trips between geofences;
- Summary;
- Digital sensors;
- Statistics.
Notifications
You can also use the configured criteria as a condition for notifications. The notification is triggered when an eco driving violation ends.
Video: Gurtam | Training session. “Eco driving” module
You can find information about the Eco driving module in the following video dated 26.09.2019: