Sensor parameters
The parameter is a required sensor property. The sensors in the system work mainly on the basis of the data sent in the parameters.
Parameters can have different names which are set in the hardware configuration, for example, param199, param240, TEMP, pwr_int, gsm, can6, and so on. As a rule, you can find out what parameters are used and what they are responsible for in the hardware specification. Also, you can see the available parameters in a separate column of the table with the data messages received from the unit.
When adding or editing a sensor, you should select its parameter in the drop-down list or enter the parameter name manually. You can use the same parameter for any number of sensors.
Virtual parameters
Virtual parameters are set in the system by default and are suitable for almost any type of equipment.
| Parameter | Description |
|---|---|
| time | UNIX time of the message |
| regtime | time of the message registration on the server |
| sats | number of satellites |
| speed | speed of movement |
| course | direction of movement |
| altitude | height above sea level |
| lon | longitude |
| lat | latitude |
Some rare device types may not support certain virtual parameters, for example, altitude or speed.
Input and output parameters
This group includes parameters of analog inputs and digital inputs and outputs.
| Parameter | Description |
|---|---|
| adcN | Analog input. N stands for the input number. For example, the adc8 parameter sends the values of the eighth analog input. The number of analog inputs in the system is not limited. |
| inN | Digital input. N stands for the input number. The N value shouldn’t be less than 1 or more than 32. Otherwise, the parameter won’t work. |
| in | The sum of the values of all digital inputs. |
| outN | Digital output. N stands for the output number. The N value shouldn’t be less than 1 or more than 32. Otherwise, the parameter won’t work. |
| out | The sum of the values of all digital outputs. |
The data on digital inputs and outputs is usually presented in messages in the following format: I/O = 0/0, where I stands for input and O for output. If I/O = 0/0, all bits (inputs and outputs) are inactive. If the value of I or O is not zero, an input or an output is activated. To find out which one, you should convert a hexadecimal number to binary and determine the bit number as in the example below.
Example
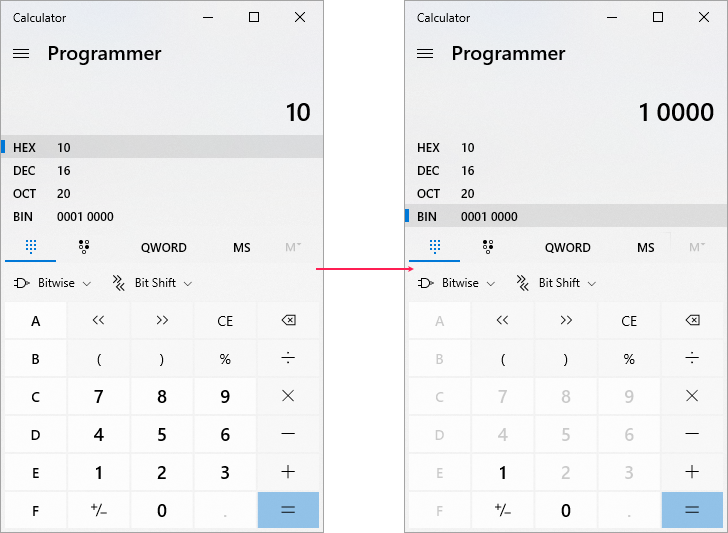
Let’s say, a message with the parameter I/O = 10/0 was sent from a place where the ignition was on. To determine the bit number (in this case, the input), you should enter the received value, that is, 10, in the calculator in hexadecimal mode (HEX), and then switch to binary mode (BIN). In the given example, the resulting binary number is 10000. Now you should determine the position of number 1 counting from the end. In our case, number 1 is the fifth from the end, which means that the ignition sensor is connected to the fifth port. Therefore, the parameter of the ignition sensor should be in5 (digital input 5).
If the device ports are numbered from zero, and not from one, then the N value in the inN and outN parameters is one more than the real port number.
Constant parameters
The constant parameter is formatted as constN, where N stands for any number. Based on this parameter, you can create a virtual sensor which always sends the N value.
You can use sensors with constant parameters in charts to indicate critical points, in expression parameters, and as validation sensors for other virtual sensors.
Text parameters
The data received in parameters is usually numeric, but in some cases, the device can send text in parameters. This can be the name of a status (business/private), state (free/busy, on/off), the time that has passed since an event, and so on.
Text parameter values are available only for the custom sensor type. To enable the correct display of text parameter values, activate the Text parameters option in the custom sensor properties.
Viewing text parameter values
Text data can be viewed in the following locations:
- in the additional unit information;
- on the Messages tab;
- in the Track player tool;
- in the Track analysis tool;
- in the Formatted value column of the Sensor tracing table.
Text values received from devices are shown in the system in their original format, therefore, it is not necessary to configure the calculation table for sensors with text parameters.
Text parameter values are considered invalid and are shown as a dashed line in reports in the following columns:
- Min value of custom sensor
- Max value of custom sensor
- Initial value of custom sensor
- Final value of custom sensor
These columns can be found in the following report tables:
- Digital sensors
- Eco driving
- Engine hours
- Fuel drains
- Fuel fillings and battery charges
- Geofences
- Summary
- Trips